Pengontrol kecepatan motor listrik 12V buatan sendiri. Produksi sendiri pengontrol kecepatan motor listrik. Fungsi dan ciri-ciri utama
Rangkaian pengontrol kecepatan motor DC beroperasi berdasarkan prinsip modulasi lebar pulsa dan digunakan untuk mengubah kecepatan motor DC 12 volt. Pengaturan kecepatan poros mesin menggunakan modulasi lebar pulsa memberikan efisiensi yang lebih besar daripada sekadar mengubah tegangan DC yang disuplai ke mesin, meskipun skema ini juga akan dipertimbangkan.
Rangkaian pengontrol kecepatan motor DC sebesar 12 volt

Motor dihubungkan dalam suatu rangkaian ke transistor efek medan yang dikendalikan oleh modulasi lebar pulsa yang dilakukan pada chip pengatur waktu NE555, itulah sebabnya rangkaian tersebut menjadi sangat sederhana.

Pengontrol PWM diimplementasikan menggunakan generator pulsa konvensional pada multivibrator astabil, menghasilkan pulsa dengan tingkat pengulangan 50 Hz dan dibangun di atas pengatur waktu NE555 yang populer. Sinyal yang berasal dari multivibrator menciptakan medan bias di gerbang transistor efek medan. Durasi pulsa positif disesuaikan dengan menggunakan resistansi variabel R2. Semakin lama durasi pulsa positif yang sampai pada gerbang transistor efek medan maka semakin besar daya yang disuplai ke motor DC. Begitu pula sebaliknya, semakin pendek durasi pulsa maka semakin lemah putaran motor listriknya. Sirkuit ini berfungsi baik pada baterai 12 volt.
Rangkaian pengatur kecepatan motor DC sebesar 6 volt
Kecepatan motor 6 volt dapat diatur dalam 5-95%
Pengontrol kecepatan mesin pada pengontrol PIC
Pengendalian kecepatan pada rangkaian ini dicapai dengan memberikan pulsa tegangan dengan durasi yang bervariasi ke motor listrik. Untuk tujuan ini, PWM (modulator lebar pulsa) digunakan. Dalam hal ini, kontrol lebar pulsa disediakan oleh mikrokontroler PIC. Untuk mengontrol kecepatan putaran mesin, digunakan dua tombol SB1 dan SB2, “More” dan “Less”. Anda dapat mengubah kecepatan putaran hanya bila tombol pengalih “Start” ditekan. Durasi denyut nadi bervariasi, sebagai persentase periode, dari 30 hingga 100%.
Sebagai penstabil tegangan mikrokontroler PIC16F628A digunakan stabilizer KR1158EN5V tiga pin yang mempunyai drop tegangan input-output yang rendah, hanya sekitar 0,6V. Tegangan masukan maksimum adalah 30V. Semua ini memungkinkan penggunaan motor dengan tegangan dari 6V hingga 27V. Transistor komposit KT829A digunakan sebagai saklar daya, yang sebaiknya dipasang pada radiator.
Perangkat ini dirakit pada papan sirkuit tercetak berukuran 61 x 52 mm. Anda dapat mengunduh gambar PCB dan file firmware dari tautan di atas. (Lihat folder di arsip 027-el)

Pengontrol kecepatan motor PWM DC
Rangkaian DIY ini dapat digunakan sebagai pengontrol kecepatan motor DC 12V dengan arus terukur hingga 5A, atau sebagai peredup untuk lampu halogen 12V dan LED hingga 50W. Kontrol dilakukan dengan menggunakan modulasi lebar pulsa (PWM) pada tingkat pengulangan pulsa sekitar 200 Hz. Secara alami, frekuensi dapat diubah jika perlu, memilih stabilitas dan efisiensi maksimum.
Sebagian besar struktur ini dirakit menurut skema yang lebih sederhana. Di sini kami menyajikan versi yang lebih canggih yang menggunakan timer 7555, driver transistor bipolar, dan MOSFET yang kuat. Desain ini memberikan kontrol kecepatan yang lebih baik dan beroperasi pada rentang beban yang luas. Ini memang skema yang sangat efektif dan biaya suku cadangnya bila dibeli untuk perakitan sendiri cukup rendah.
Rangkaian pengontrol PWM untuk motor 12 V
![]()
Rangkaian ini menggunakan Timer 7555 untuk membuat lebar pulsa variabel sekitar 200 Hz. Ia mengontrol transistor Q3 (melalui transistor Q1 - Q2), yang mengontrol kecepatan motor listrik atau bola lampu.
![]()
![]()
Ada banyak aplikasi untuk rangkaian ini yang akan ditenagai oleh 12V: motor listrik, kipas angin atau lampu. Dapat digunakan di mobil, kapal dan kendaraan listrik, di model kereta api dan sebagainya.
![]()
Lampu LED 12 V, misalnya strip LED, juga dapat dihubungkan dengan aman di sini. Semua orang tahu bahwa lampu LED jauh lebih efisien dibandingkan lampu halogen atau lampu pijar dan akan bertahan lebih lama. Dan jika perlu, beri daya pada pengontrol PWM dari 24 volt atau lebih, karena sirkuit mikro itu sendiri dengan tahap buffer memiliki penstabil daya.
 Pengontrol Kecepatan Motor AC
Pengontrol Kecepatan Motor AC
![]() Pengontrol PWM 12 volt
Pengontrol PWM 12 volt
 Penggerak Regulator DC Setengah Jembatan
Penggerak Regulator DC Setengah Jembatan
 Rangkaian pengontrol kecepatan bor mini
Rangkaian pengontrol kecepatan bor mini
Diagram dan gambaran umum pengontrol kecepatan motor listrik 220V
Untuk menambah dan mengurangi kecepatan putaran poros dengan lancar, terdapat perangkat khusus - pengontrol kecepatan motor listrik 220V. Pengoperasian yang stabil, tidak ada gangguan tegangan, masa pakai yang lama - keuntungan menggunakan pengontrol kecepatan mesin untuk 220, 12 dan 24 volt.
- Mengapa Anda memerlukan konverter frekuensi?
- Lingkup aplikasi
- Memilih perangkat
- JIKA perangkat
- Jenis perangkat
- Perangkat triac
- Proses Sinyal Proporsional
Mengapa Anda memerlukan konverter frekuensi?
 Fungsi regulator adalah membalikkan tegangan 12, 24 volt, memastikan kelancaran start dan stop menggunakan modulasi lebar pulsa.
Fungsi regulator adalah membalikkan tegangan 12, 24 volt, memastikan kelancaran start dan stop menggunakan modulasi lebar pulsa.
Pengontrol kecepatan disertakan dalam struktur banyak perangkat, karena memastikan keakuratan kontrol kelistrikan. Ini memungkinkan Anda untuk mengatur kecepatan ke jumlah yang diinginkan.
Lingkup aplikasi
Pengontrol kecepatan motor DC digunakan di banyak aplikasi industri dan domestik. Misalnya:
- kompleks pemanas;
- penggerak peralatan;
- mesin las;
- oven listrik;
- penyedot debu;
- mesin jahit;
- mesin cuci.
Memilih perangkat
![]() Untuk memilih regulator yang efektif, perlu mempertimbangkan karakteristik perangkat dan tujuan yang dimaksudkan.
Untuk memilih regulator yang efektif, perlu mempertimbangkan karakteristik perangkat dan tujuan yang dimaksudkan.
- Pengendali vektor umum digunakan pada motor komutator, namun pengendali skalar lebih dapat diandalkan.
- Kriteria seleksi yang penting adalah kekuasaan. Itu harus sesuai dengan yang diizinkan pada unit yang digunakan. Lebih baik melebihinya untuk pengoperasian sistem yang aman.
- Tegangan harus berada dalam rentang lebar yang dapat diterima.
- Tujuan utama regulator adalah untuk mengubah frekuensi, sehingga aspek ini harus dipilih sesuai dengan persyaratan teknis.
- Anda juga perlu memperhatikan masa pakai, dimensi, jumlah input.
JIKA perangkat
- pengontrol alami motor AC;
- menyetir;
- elemen tambahan.
Diagram rangkaian pengontrol kecepatan mesin 12 V ditunjukkan pada gambar. Kecepatannya diatur menggunakan potensiometer. Jika pulsa dengan frekuensi 8 kHz diterima pada input, maka tegangan suplai akan menjadi 12 volt.
Perangkat dapat dibeli di tempat penjualan khusus, atau Anda dapat membuatnya sendiri.

Rangkaian pengontrol kecepatan AC
Ketika motor tiga fasa dihidupkan dengan daya penuh, arus dialirkan, tindakan ini diulangi sekitar 7 kali. Arus membengkokkan belitan motor, menghasilkan panas dalam jangka waktu yang lama. Konverter adalah inverter yang menyediakan konversi energi. Tegangan masuk ke regulator, dimana 220 volt disearahkan menggunakan dioda yang terletak di input. Kemudian arus disaring melalui 2 kapasitor. PWM dihasilkan. Selanjutnya, sinyal pulsa ditransmisikan dari belitan motor ke sinusoid tertentu.
Ada perangkat 12V universal untuk motor tanpa sikat.
Untuk menghemat tagihan listrik, pembaca kami merekomendasikan Kotak Hemat Listrik. Pembayaran bulanan akan berkurang 30-50% dibandingkan sebelum menggunakan tabungan. Ini menghilangkan komponen reaktif dari jaringan, sehingga mengurangi beban dan, sebagai konsekuensinya, konsumsi arus. Peralatan listrik mengkonsumsi lebih sedikit listrik dan biaya berkurang.

Sirkuit ini terdiri dari dua bagian - logis dan daya. Mikrokontroler terletak pada sebuah chip. Skema ini khas untuk mesin bertenaga. Keunikan regulator terletak pada penggunaannya dengan berbagai jenis mesin. Sirkuit diberi daya secara terpisah; driver utama memerlukan daya 12V.
Jenis perangkat
Perangkat triac
Perangkat triac digunakan untuk mengontrol pencahayaan, kekuatan elemen pemanas, dan kecepatan putaran.
 Rangkaian pengontrol berbasis triac berisi minimal bagian-bagian yang ditunjukkan pada gambar, dimana C1 adalah kapasitor, R1 adalah resistor pertama, R2 adalah resistor kedua.
Rangkaian pengontrol berbasis triac berisi minimal bagian-bagian yang ditunjukkan pada gambar, dimana C1 adalah kapasitor, R1 adalah resistor pertama, R2 adalah resistor kedua.
Menggunakan konverter, daya diatur dengan mengubah waktu triac terbuka. Jika tertutup, kapasitor diisi oleh beban dan resistor. Satu resistor mengontrol jumlah arus, dan resistor kedua mengatur laju pengisian.
Ketika kapasitor mencapai ambang tegangan maksimum 12V atau 24V, sakelar diaktifkan. Triac masuk ke keadaan terbuka. Ketika tegangan listrik melewati nol, triacistor terkunci, kemudian kapasitor mengeluarkan muatan negatif.
Konverter pada kunci elektronik
Regulator thyristor umum dengan rangkaian operasi sederhana.

Thyristor, bekerja pada jaringan arus bolak-balik.
Jenis terpisah adalah penstabil tegangan AC. Stabilizer berisi transformator dengan banyak belitan.

Rangkaian penstabil DC

Pengisi daya thyristor 24 volt
Ke sumber tegangan 24 volt. Prinsip operasinya adalah mengisi kapasitor dan thyristor yang terkunci, dan ketika kapasitor mencapai tegangan, thyristor mengirimkan arus ke beban.
Proses Sinyal Proporsional
Sinyal yang sampai pada masukan sistem berupa umpan balik. Mari kita lihat lebih dekat menggunakan sirkuit mikro.

Chip TDA 1085
Chip TDA 1085 yang digambarkan di atas memberikan kontrol umpan balik motor 12V, 24V tanpa kehilangan daya. Wajib memiliki takometer, yang memberikan umpan balik dari mesin ke papan kontrol. Sinyal sensor stabilisasi masuk ke sirkuit mikro, yang meneruskan tugas ke elemen daya - untuk menambah tegangan ke motor. Ketika poros dibebani, papan meningkatkan tegangan dan daya meningkat. Dengan melepaskan poros, tegangannya berkurang. Putarannya akan konstan, tetapi torsi tenaganya tidak akan berubah. Frekuensi dikontrol dalam rentang yang luas. Motor 12, 24 volt dipasang di mesin cuci.
Dengan tangan Anda sendiri, Anda dapat membuat alat untuk penggiling, mesin bubut kayu, rautan, pengaduk beton, pemotong jerami, mesin pemotong rumput, pembagi kayu dan masih banyak lagi.
 Regulator industri, terdiri dari pengontrol 12, 24 volt, diisi dengan resin sehingga tidak dapat diperbaiki. Oleh karena itu, perangkat 12V sering kali dibuat secara mandiri. Opsi sederhana menggunakan chip U2008B. Pengontrol menggunakan umpan balik saat ini atau soft start. Jika yang terakhir digunakan, elemen C1, R4 diperlukan, jumper X1 tidak diperlukan, tetapi dengan umpan balik, dan sebaliknya.
Regulator industri, terdiri dari pengontrol 12, 24 volt, diisi dengan resin sehingga tidak dapat diperbaiki. Oleh karena itu, perangkat 12V sering kali dibuat secara mandiri. Opsi sederhana menggunakan chip U2008B. Pengontrol menggunakan umpan balik saat ini atau soft start. Jika yang terakhir digunakan, elemen C1, R4 diperlukan, jumper X1 tidak diperlukan, tetapi dengan umpan balik, dan sebaliknya.
Saat merakit regulator, pilih resistor yang tepat. Karena dengan resistor besar mungkin ada sentakan di awal, dan dengan resistor kecil kompensasinya tidak akan mencukupi.
Penting! Saat menyesuaikan pengontrol daya, Anda harus ingat bahwa semua bagian perangkat terhubung ke jaringan AC, jadi tindakan pencegahan keselamatan harus diperhatikan!
Pengontrol kecepatan untuk motor satu fasa dan tiga fasa 24 volt, 12 volt merupakan perangkat yang fungsional dan berharga, baik dalam kehidupan sehari-hari maupun di industri.
DIAGRAM KONTROL KECEPATAN MESIN
Regulator untuk motor AC
Berdasarkan triac BT138-600 yang kuat, Anda dapat merakit sirkuit untuk pengontrol kecepatan motor AC. Rangkaian ini dirancang untuk mengatur kecepatan putaran motor listrik mesin bor, kipas angin, penyedot debu, penggiling, dll. Kecepatan motor dapat diatur dengan mengubah resistansi potensiometer P1. Parameter P1 menentukan fase pulsa pemicu yang membuka triac. Sirkuit ini juga menjalankan fungsi stabilisasi, yang menjaga kecepatan mesin meski di bawah beban berat.
Diagram skema pengatur motor AC

Misalnya, ketika motor mesin bor melambat karena meningkatnya hambatan logam, EMF motor juga berkurang. Hal ini menyebabkan peningkatan tegangan pada R2-P1 dan C3 yang menyebabkan triac terbuka lebih lama, dan kecepatan pun meningkat.

Regulator untuk motor DC
Metode paling sederhana dan populer untuk mengatur kecepatan putaran motor DC didasarkan pada penggunaan modulasi lebar pulsa ( PWM atau PWM ). Dalam hal ini, tegangan suplai disuplai ke motor dalam bentuk pulsa. Tingkat pengulangan pulsa tetap konstan, namun durasinya dapat berubah - sehingga kecepatan (kekuatan) juga berubah.

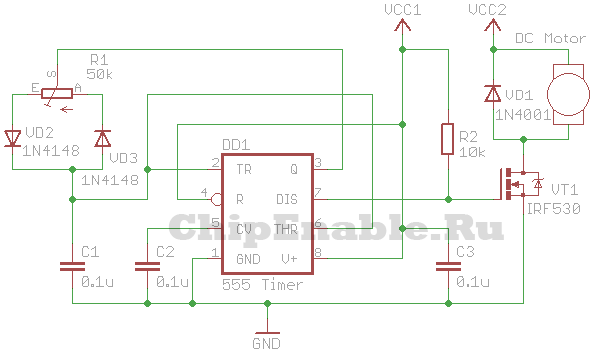
Untuk menghasilkan sinyal PWM, Anda dapat mengambil rangkaian berbasis chip NE555. Rangkaian paling sederhana dari pengontrol kecepatan motor DC ditunjukkan pada gambar:
Diagram skema pengatur motor listrik daya konstan

Di sini VT1 adalah transistor efek medan tipe-n yang mampu menahan arus motor maksimum pada tegangan dan beban poros tertentu. VCC1 adalah dari 5 hingga 16 V, VCC2 lebih besar dari atau sama dengan VCC1. Frekuensi sinyal PWM dapat dihitung dengan menggunakan rumus:
dimana R1 dalam ohm, C1 dalam farad.
Dengan nilai yang ditunjukkan pada diagram di atas, frekuensi sinyal PWM akan sama dengan:
F = 1,44/(50000*0,0000001) = 290Hz.
Perlu dicatat bahwa bahkan perangkat modern, termasuk perangkat dengan daya kontrol tinggi, didasarkan pada sirkuit seperti itu. Tentu saja, menggunakan elemen yang lebih kuat yang mampu menahan arus yang lebih tinggi.
PWM - pengatur kecepatan mesin pada timer 555
 Timer 555 banyak digunakan pada perangkat kontrol, misalnya di PWM - pengontrol kecepatan untuk motor DC.
Timer 555 banyak digunakan pada perangkat kontrol, misalnya di PWM - pengontrol kecepatan untuk motor DC.
Siapa pun yang pernah menggunakan obeng nirkabel mungkin pernah mendengar suara mencicit dari dalam. Ini adalah siulan belitan motor di bawah pengaruh tegangan pulsa yang dihasilkan oleh sistem PWM.
Mengatur kecepatan mesin yang terhubung ke baterai dengan cara lain adalah hal yang tidak senonoh, meskipun hal itu sangat mungkin dilakukan. Misalnya, cukup sambungkan rheostat kuat secara seri dengan motor, atau gunakan pengatur tegangan linier yang dapat disesuaikan dengan radiator besar.
Varian regulator PWM berbasis timer 555 ditunjukkan pada Gambar 1.
Rangkaian ini cukup sederhana dan didasarkan pada multivibrator, meskipun diubah menjadi generator pulsa dengan siklus kerja yang dapat disesuaikan, yang bergantung pada rasio laju pengisian dan pengosongan kapasitor C1.
Kapasitor diisi melalui rangkaian: +12V, R1, D1, sisi kiri resistor P1, C1, GND. Dan kapasitor dilepaskan di sepanjang rangkaian: pelat atas C1, sisi kanan resistor P1, dioda D2, pin 7 pengatur waktu, pelat bawah C1. Dengan memutar penggeser resistor P1, Anda dapat mengubah rasio resistansi bagian kiri dan kanannya, dan juga waktu pengisian dan pengosongan kapasitor C1, dan, sebagai konsekuensinya, siklus kerja pulsa.

Gambar 1. Rangkaian PWM - regulator pada timer 555
Skema ini sangat populer sehingga sudah tersedia dalam bentuk satu set, seperti terlihat pada gambar berikut.


Gambar 2. Diagram skema seperangkat regulator PWM.
Diagram waktu juga ditampilkan di sini, tetapi sayangnya, nilai bagiannya tidak ditampilkan. Mereka dapat dilihat pada Gambar 1, oleh karena itu ditampilkan di sini. Alih-alih transistor bipolar TR1, tanpa mengubah rangkaian, Anda dapat menggunakan efek medan yang kuat, yang akan meningkatkan daya beban.
Omong-omong, elemen lain muncul di sirkuit ini - dioda D4. Tujuannya adalah untuk mencegah keluarnya kapasitor timing C1 melalui sumber listrik dan beban – motor. Ini memastikan stabilisasi frekuensi PWM.
Omong-omong, dengan bantuan sirkuit seperti itu Anda tidak hanya dapat mengontrol kecepatan motor DC, tetapi juga beban aktif - lampu pijar atau semacam elemen pemanas.

Gambar 3. Papan sirkuit tercetak dari satu set regulator PWM.
Jika Anda melakukan sedikit pekerjaan, sangat mungkin untuk membuatnya kembali menggunakan salah satu program untuk menggambar papan sirkuit tercetak. Meskipun mengingat jumlah bagian yang sedikit, akan lebih mudah untuk merakit satu salinan menggunakan instalasi berengsel.

Gambar 4. Tampilan seperangkat regulator PWM.
Benar, set bermerek yang sudah dirakit terlihat cukup bagus.
Di sini, mungkin seseorang akan bertanya: “Beban pada regulator ini dihubungkan antara +12V dan kolektor transistor keluaran. Tapi bagaimana, misalnya di dalam mobil, karena semua yang ada di sana sudah terhubung dengan tanah, bodi, mobil?”
Ya, Anda tidak dapat membantah massa; di sini kami hanya dapat merekomendasikan memindahkan saklar transistor ke celah “positif”; kabel. Versi yang mungkin dari skema tersebut ditunjukkan pada Gambar 5.

Gambar 6 menunjukkan tahap keluaran MOSFET secara terpisah. Saluran pembuangan transistor terhubung ke baterai +12V, gerbangnya hanya hang 9raquo; di udara (yang tidak disarankan), beban dihubungkan ke sirkuit sumber, dalam kasus kami bola lampu. Gambar ini ditampilkan hanya untuk menjelaskan cara kerja transistor MOSFET.

Untuk membuka transistor MOSFET, cukup memberikan tegangan positif ke gerbang relatif terhadap sumber. Dalam hal ini, bola lampu akan menyala dengan intensitas penuh dan akan bersinar hingga transistor ditutup.
Pada gambar ini, cara termudah untuk mematikan transistor adalah dengan melakukan hubungan arus pendek gerbang ke sumber. Dan penutupan manual seperti itu cukup cocok untuk memeriksa transistor, tetapi pada rangkaian nyata, terutama rangkaian pulsa, Anda harus menambahkan beberapa detail lagi, seperti yang ditunjukkan pada Gambar 5.
Seperti disebutkan di atas, sumber tegangan tambahan diperlukan untuk menghidupkan transistor MOSFET. Di sirkuit kami, perannya dimainkan oleh kapasitor C1, yang diisi melalui sirkuit +12V, R2, VD1, C1, LA1, GND.
Untuk membuka transistor VT1, tegangan positif dari kapasitor C2 yang terisi harus diterapkan ke gerbangnya. Hal ini cukup jelas bahwa ini hanya akan terjadi ketika transistor VT2 terbuka. Dan ini hanya mungkin jika transistor optocoupler OP1 ditutup. Kemudian tegangan positif dari plat positif kapasitor C2 melalui resistor R4 dan R1 akan membuka transistor VT2.
Pada saat ini, sinyal input PWM harus berada pada level rendah dan melewati LED optocoupler (penyertaan LED ini sering disebut terbalik), oleh karena itu, LED optocoupler mati dan transistor ditutup.
Untuk mematikan transistor keluaran, Anda perlu menghubungkan gerbangnya ke sumber. Di sirkuit kami, ini akan terjadi ketika transistor VT3 terbuka, dan ini mengharuskan transistor keluaran optocoupler OP1 terbuka.
Sinyal PWM saat ini berada pada level tinggi, sehingga LED tidak dilangsir dan memancarkan sinar infra merah yang ditugaskan padanya, transistor optocoupler OP1 terbuka, yang akibatnya mematikan beban - bola lampu.
Salah satu opsi untuk menggunakan skema seperti itu di dalam mobil adalah lampu berjalan siang hari. Dalam hal ini, pengendara mengaku menggunakan lampu high beam yang dinyalakan dengan intensitas penuh. Paling sering desain ini ada pada mikrokontroler. Ada banyak di Internet, tetapi lebih mudah melakukannya dengan pengatur waktu NE555.
j&;tukang listrik Dalam tentang - teknik kelistrikan dan elektronik, otomasi rumah, l&;artikel tentang konstruksi dan perbaikan kabel listrik rumah, soket dan sakelar, kabel dan kabel, dan&;sumber l&;veta, tindakan menarik dan banyak lagi untuk tukang listrik dan pembangun rumah.
Informasi dan materi pelatihan untuk teknisi listrik lainnya.
Kunci, contoh dan solusi teknis, ikhtisar inovasi kelistrikan yang menarik.
Informasi di situs j&;electrician disediakan dalam informasi dan dokumen pendidikan. Administrasi situs tidak bertanggung jawab atas penggunaan informasi ini. Sai bisa mendapatkan material 12+
Reproduksi bahan l&ite k&;dilarang.
Banyak rangkaian elektronik yang menggunakan sistem pendingin aktif dengan kipas. Paling sering, motor mereka dikendalikan oleh mikrokontroler atau chip khusus lainnya, dan kecepatan putaran dikontrol menggunakan PWM. Solusi ini ditandai dengan pengoperasian yang tidak terlalu lancar, dapat menyebabkan pengoperasian kipas tidak stabil, dan selain itu, menimbulkan banyak gangguan.
Pengontrol kecepatan kipas analog telah dikembangkan untuk kebutuhan perlengkapan audio berkualitas tinggi. Sirkuit ini berguna dalam konstruksi amplifier frekuensi rendah dengan sistem pendingin aktif dan memungkinkan penyesuaian kecepatan kipas yang lancar tergantung pada suhu. Kinerja dan daya terutama bergantung pada transistor keluaran; pengujian dilakukan dengan arus keluaran hingga 2 A, yang memungkinkan Anda menghubungkan bahkan beberapa kipas besar 12 V. Tentu saja, perangkat ini juga dapat digunakan untuk mengontrol motor DC konvensional, sehingga meningkatkan daya tegangan suplai jika perlu. Meskipun untuk mesin yang sangat bertenaga Anda harus menggunakan sistem soft start tehprivod.su/katalog/ustroystva-plavnogo-puska
Diagram skema pengontrol kecepatan motor
Rangkaian ini terdiri dari dua bagian: penguat diferensial dan penstabil tegangan. Bagian pertama berkaitan dengan pengukuran suhu dan memberikan tegangan yang sebanding dengan suhu ketika melebihi ambang batas yang ditetapkan. Tegangan ini merupakan tegangan kendali untuk penstabil tegangan, yang keluarannya mengontrol suplai daya ke kipas.
Diagram rangkaian pengontrol kecepatan motor DC ditunjukkan pada gambar. Basisnya adalah komparator U2 (LM393), yang bekerja dalam konfigurasi ini sebagai penguat operasional biasa. Bagian pertamanya, U2A, berfungsi sebagai penguat diferensial, yang kondisi pengoperasiannya ditentukan oleh resistor R4-R5 (47k) dan R6-R7 (220k). Kapasitor C10 (22pF) meningkatkan stabilitas amplifier, dan R12 (10k) menarik output komparator ke catu daya positif.

Tegangan diterapkan ke salah satu input penguat diferensial, yang dihasilkan melalui pembagi yang terdiri dari R2 (6,8k), R3 (680 Ohm) dan PR1 (500 Ohm), dan disaring menggunakan C4 (100nF). Input kedua penguat ini menerima tegangan dari sensor suhu, yang dalam hal ini adalah salah satu konektor transistor T1 (BD139), terpolarisasi dengan arus kecil menggunakan R1 (6.8k).
Kapasitor C2 (100nF) ditambahkan untuk menyaring tegangan dari sensor suhu. Polaritas sensor dan pembagi tegangan referensi diatur oleh regulator U1 (78L05) bersama dengan kapasitor C1 (1000uF/16V), C3 (100nF) dan C5 (47uF/25V), memberikan tegangan stabil sebesar 5 V.
Komparator U2B berfungsi sebagai penguat kesalahan klasik. Ini membandingkan tegangan dari keluaran penguat diferensial dengan tegangan keluaran menggunakan R10 (3,3k), R11 (47 ohm) dan PR2 (200 ohm). Elemen eksekutif stabilizer adalah transistor T2 (IRF5305), yang basisnya dikendalikan oleh pembagi R8 (10k) dan R9 (5.1k).
Kapasitor C6 (1uF) dan C7 (22pF) dan C9 (10nF) meningkatkan stabilitas loop umpan balik. Kapasitor C8 (1000uF/16V) menyaring tegangan keluaran, memiliki dampak signifikan terhadap stabilitas sistem. Konektor outputnya adalah AR2 (TB2), dan konektor dayanya adalah AR1 (TB2).

Berkat penggunaan transistor keluaran dengan resistansi rendah, rangkaian ini memiliki putus tegangan yang sangat rendah - sekitar 50 mV pada arus keluaran 1 A, yang tidak memerlukan catu daya tegangan lebih tinggi untuk menggerakkan kipas 12 V.

Dalam kebanyakan kasus, penguat operasional populer LM358 dapat digunakan sebagai U2, meskipun parameter keluarannya akan sedikit lebih buruk.
Perakitan pengatur
Pemasangan harus dimulai dengan pemasangan dua jumper, kemudian semua resistor dan kapasitor keramik kecil harus dipasang.


Dalam kebanyakan kasus, kedua elemen ini akan dipasang di bagian bawah papan dengan kaki yang ditekuk pada sudut 90 derajat. Pengaturan ini memungkinkannya disekrup langsung ke radiator (pastikan menggunakan gasket isolasi).
Diskusikan artikel PENGENDALI KECEPATAN MESIN 12 V
Metode paling sederhana untuk mengontrol kecepatan putaran motor DC didasarkan pada penggunaan modulasi lebar pulsa (PWM atau PWM). Inti dari metode ini adalah tegangan suplai disuplai ke motor dalam bentuk pulsa. Dalam hal ini, laju pengulangan denyut nadi tetap konstan, namun durasinya dapat bervariasi.
Sinyal PWM dicirikan oleh parameter seperti siklus kerja atau siklus kerja. Ini adalah kebalikan dari siklus kerja dan sama dengan rasio durasi pulsa terhadap periodenya.
D = (t/T) * 100%
Gambar di bawah menunjukkan sinyal PWM dengan siklus kerja berbeda.
Dengan metode kendali ini, kecepatan putaran motor akan sebanding dengan duty cycle sinyal PWM.
Rangkaian Kendali Motor DC Sederhana
Rangkaian kendali motor DC yang paling sederhana terdiri dari transistor efek medan, yang gerbangnya disuplai dengan sinyal PWM. Transistor pada rangkaian ini bertindak sebagai saklar elektronik yang mengalihkan salah satu terminal motor ke ground. Transistor terbuka pada saat durasi pulsa.

Bagaimana perilaku mesin saat dihidupkan seperti ini? Jika frekuensi sinyal PWM rendah (beberapa Hz), motor akan berputar secara tiba-tiba. Ini terutama akan terlihat dengan siklus kerja sinyal PWM yang kecil.
Pada frekuensi ratusan Hz, motor akan berputar terus menerus dan kecepatan putarannya akan berubah sebanding dengan siklus kerja. Secara kasar, mesin akan “melihat” nilai rata-rata energi yang disuplai ke dalamnya.
Sirkuit untuk menghasilkan sinyal PWM
Ada banyak rangkaian untuk menghasilkan sinyal PWM. Salah satu yang paling sederhana adalah rangkaian berdasarkan timer 555. Ini memerlukan komponen minimum, tidak memerlukan pengaturan dan dapat dirakit dalam satu jam.

Tegangan suplai rangkaian VCC dapat berada pada kisaran 5 – 16 Volt. Hampir semua dioda dapat digunakan sebagai dioda VD1 - VD3.
Jika Anda tertarik untuk memahami cara kerja rangkaian ini, Anda perlu mengacu pada diagram blok timer 555. Timer terdiri dari pembagi tegangan, dua komparator, flip-flop, saklar kolektor terbuka dan buffer keluaran.

Catu daya (VCC) dan pin reset dihubungkan ke catu daya plus, katakanlah +5 V, dan pin ground (GND) ke minus. Kolektor terbuka transistor (pin DISC) dihubungkan ke catu daya positif melalui resistor dan sinyal PWM dihilangkan darinya. Pin CONT tidak digunakan; kapasitor terhubung dengannya. Pin komparator THRES dan TRIG digabungkan dan dihubungkan ke rangkaian RC yang terdiri dari resistor variabel, dua dioda dan sebuah kapasitor. Pin tengah resistor variabel dihubungkan ke pin OUT. Terminal ekstrim dari resistor dihubungkan melalui dioda ke kapasitor, yang dihubungkan ke ground dengan terminal kedua. Berkat penyertaan dioda ini, kapasitor diisi melalui satu bagian resistor variabel dan dibuang melalui bagian lainnya.
Pada saat power dihidupkan, pin OUT berada pada level logika rendah, kemudian pin THRES dan TRIG berkat dioda VD2 juga akan berada pada level rendah. Komparator atas akan mengalihkan output ke nol, dan komparator bawah ke satu. Keluaran trigger akan disetel ke nol (karena mempunyai inverter pada keluarannya), saklar transistor akan menutup, dan pin OUT akan disetel ke level tinggi (karena mempunyai inverter pada masukan). Selanjutnya kapasitor C3 akan mulai mengisi daya melalui dioda VD1. Ketika diisi ke tingkat tertentu, komparator bawah akan beralih ke nol, dan komparator atas akan mengalihkan output ke satu. Output pemicu akan diatur ke tingkat kesatuan, saklar transistor akan terbuka, dan pin OUT akan diatur ke tingkat rendah. Kapasitor C3 akan mulai mengalir melalui dioda VD2 hingga benar-benar habis dan komparator mengalihkan pemicu ke keadaan lain. Siklus tersebut kemudian akan berulang.
Perkiraan frekuensi sinyal PWM yang dihasilkan oleh rangkaian ini dapat dihitung menggunakan rumus berikut:
F = 1,44/(R1*C1), [Hz]
dimana R1 dalam ohm, C1 dalam farad.
Dengan nilai yang ditunjukkan pada diagram di atas, frekuensi sinyal PWM akan sama dengan:
F = 1,44/(50000*0,0000001) = 288Hz.
Pengontrol kecepatan motor PWM DC
Mari kita gabungkan dua rangkaian yang disajikan di atas, dan kita mendapatkan rangkaian pengontrol kecepatan motor DC sederhana, yang dapat digunakan untuk mengontrol kecepatan mesin mainan, robot, bor mikro, dll.
VT1 adalah transistor efek medan tipe-n yang mampu menahan arus motor maksimum pada tegangan dan beban poros tertentu. VCC1 adalah dari 5 hingga 16 V, VCC2 lebih besar dari atau sama dengan VCC1.
Alih-alih transistor efek medan, Anda dapat menggunakan transistor n-p-n bipolar, transistor Darlington, atau relai opto dengan daya yang sesuai.
Setiap perkakas listrik atau peralatan rumah tangga modern menggunakan motor komutator. Hal ini disebabkan keserbagunaannya, yaitu kemampuannya untuk beroperasi pada tegangan bolak-balik dan searah. Keunggulan lainnya adalah torsi awal yang efisien.
Namun kecepatan motor komutator yang tinggi tidak cocok untuk semua pengguna. Untuk permulaan yang mulus dan kemampuan untuk mengubah kecepatan putaran, sebuah regulator diciptakan, yang sangat mungkin dibuat dengan tangan Anda sendiri.
Prinsip pengoperasian dan jenis motor komutator
Setiap motor listrik terdiri dari komutator, stator, rotor dan sikat. Prinsip pengoperasiannya cukup sederhana:
Selain perangkat standar, ada juga:

Perangkat pengatur
Ada banyak skema perangkat semacam itu di dunia. Namun semuanya dapat dibagi menjadi 2 kelompok: produk standar dan produk modifikasi.
Perangkat standar
Produk tipikal dibedakan berdasarkan kemudahan pembuatan idynistor dan keandalan yang baik saat mengubah kecepatan mesin. Biasanya, model tersebut didasarkan pada regulator thyristor. Prinsip pengoperasian skema tersebut cukup sederhana:

Dengan demikian, kecepatan motor komutator diatur. Dalam kebanyakan kasus, skema serupa digunakan pada penyedot debu rumah tangga asing. Namun, Anda harus tahu bahwa pengontrol kecepatan seperti itu tidak memiliki umpan balik. Oleh karena itu, ketika beban berubah, kecepatan motor listrik harus disesuaikan.
Skema yang diubah
 Tentu saja, perangkat standar ini cocok untuk banyak penggemar pengontrol kecepatan untuk "menggali" ke dalam elektronik. Namun, tanpa kemajuan dan peningkatan produk, kita masih hidup di Zaman Batu. Oleh karena itu, skema yang lebih menarik terus diciptakan, yang dengan senang hati digunakan oleh banyak produsen.
Tentu saja, perangkat standar ini cocok untuk banyak penggemar pengontrol kecepatan untuk "menggali" ke dalam elektronik. Namun, tanpa kemajuan dan peningkatan produk, kita masih hidup di Zaman Batu. Oleh karena itu, skema yang lebih menarik terus diciptakan, yang dengan senang hati digunakan oleh banyak produsen.
Yang paling umum digunakan adalah rheostat dan regulator integral. Sesuai dengan namanya, opsi pertama didasarkan pada rangkaian rheostat. Dalam kasus kedua, pengatur waktu integral digunakan.
Reostatik efektif dalam mengubah jumlah putaran motor komutator. Efisiensi tinggi disebabkan oleh transistor daya, yang mengambil bagian dari tegangan. Dengan demikian, aliran arus berkurang dan motor bekerja dengan lebih sedikit tenaga.
Video: perangkat kontrol kecepatan dengan pemeliharaan daya
Kerugian utama dari skema ini adalah banyaknya panas yang dihasilkan. Oleh karena itu, untuk kelancaran pengoperasian, regulator harus selalu didinginkan. Apalagi pendinginan perangkat harus intensif.
 Pendekatan yang berbeda diterapkan pada regulator integral, di mana pengatur waktu integral bertanggung jawab atas beban. Biasanya, transistor dari hampir semua jenis digunakan di sirkuit tersebut. Hal ini disebabkan oleh fakta bahwa ia berisi sirkuit mikro dengan nilai arus keluaran yang besar.
Pendekatan yang berbeda diterapkan pada regulator integral, di mana pengatur waktu integral bertanggung jawab atas beban. Biasanya, transistor dari hampir semua jenis digunakan di sirkuit tersebut. Hal ini disebabkan oleh fakta bahwa ia berisi sirkuit mikro dengan nilai arus keluaran yang besar.
Jika beban kurang dari 0,1 ampere, maka semua tegangan langsung menuju ke sirkuit mikro, melewati transistor. Namun agar regulator dapat beroperasi secara efektif, diperlukan tegangan 12V pada gerbangnya. Oleh karena itu, rangkaian listrik dan tegangan suplai itu sendiri harus sesuai dengan kisaran ini.
Ikhtisar sirkuit tipikal
 Anda dapat mengatur putaran poros motor listrik berdaya rendah dengan menghubungkan resistor daya secara seri dengan no. Namun, opsi ini memiliki efisiensi yang sangat rendah dan ketidakmampuan untuk mengubah kecepatan dengan lancar. Untuk menghindari gangguan seperti itu, sebaiknya perhatikan beberapa rangkaian regulator yang paling sering digunakan.
Anda dapat mengatur putaran poros motor listrik berdaya rendah dengan menghubungkan resistor daya secara seri dengan no. Namun, opsi ini memiliki efisiensi yang sangat rendah dan ketidakmampuan untuk mengubah kecepatan dengan lancar. Untuk menghindari gangguan seperti itu, sebaiknya perhatikan beberapa rangkaian regulator yang paling sering digunakan.
Seperti yang Anda ketahui, PWM memiliki amplitudo pulsa yang konstan. Selain itu, amplitudonya identik dengan tegangan suplai. Alhasil, motor listrik tidak akan berhenti meski berjalan pada kecepatan rendah.
Opsi kedua mirip dengan yang pertama. Satu-satunya perbedaan adalah penguat operasional digunakan sebagai osilator utama. Komponen ini mempunyai frekuensi 500 Hz dan menghasilkan pulsa berbentuk segitiga. Penyesuaian juga dilakukan dengan menggunakan resistor variabel.
Cara membuatnya sendiri
 Jika Anda tidak ingin mengeluarkan uang untuk membeli perangkat yang sudah jadi, Anda bisa membuatnya sendiri. Dengan cara ini, Anda tidak hanya dapat menghemat uang, tetapi juga mendapatkan pengalaman yang bermanfaat. Jadi, untuk membuat regulator thyristor Anda memerlukan:
Jika Anda tidak ingin mengeluarkan uang untuk membeli perangkat yang sudah jadi, Anda bisa membuatnya sendiri. Dengan cara ini, Anda tidak hanya dapat menghemat uang, tetapi juga mendapatkan pengalaman yang bermanfaat. Jadi, untuk membuat regulator thyristor Anda memerlukan:
- besi solder (untuk memeriksa fungsionalitas);
- kabel;
- thyristor, kapasitor dan resistor;
- skema.
Terlihat dari diagram, regulator hanya mengontrol 1 setengah siklus. Namun, untuk menguji kinerja pada besi solder biasa, ini sudah cukup.
Jika Anda tidak memiliki pengetahuan yang cukup untuk menguraikan diagram, Anda dapat membaca versi teksnya:

Penggunaan regulator memungkinkan penggunaan motor listrik lebih irit. Dalam situasi tertentu, perangkat semacam itu dapat dibuat secara mandiri. Namun, untuk tujuan yang lebih serius (misalnya, memantau peralatan pemanas), lebih baik membeli model yang sudah jadi. Untungnya, pilihan produk tersebut di pasaran sangat banyak, dan harganya cukup terjangkau.
Anda dapat mengatur kecepatan putaran poros motor komutator berdaya rendah dengan menghubungkannya secara seri ke rangkaian catu dayanya. Namun opsi ini menghasilkan efisiensi yang sangat rendah, dan selain itu tidak ada kemungkinan untuk mengubah kecepatan putaran dengan lancar.
Hal utama adalah bahwa metode ini terkadang menyebabkan motor listrik berhenti total pada tegangan suplai rendah. Pengontrol kecepatan motor listrik Rangkaian DC yang dijelaskan dalam artikel ini tidak memiliki kelemahan ini. Sirkuit ini juga berhasil digunakan untuk mengubah kecerahan lampu pijar 12 volt.
Deskripsi 4 rangkaian pengatur kecepatan motor listrik
Skema pertama
Kecepatan putaran diubah oleh resistor variabel R5, yang mengubah durasi pulsa. Karena amplitudo pulsa PWM konstan dan sama dengan tegangan suplai motor listrik, maka tidak pernah berhenti bahkan pada kecepatan putaran yang sangat rendah.
Skema kedua
Mirip dengan yang sebelumnya, tetapi penguat operasional DA1 (K140UD7) digunakan sebagai osilator utama.

Op-amp ini berfungsi sebagai pembangkit tegangan yang menghasilkan pulsa berbentuk segitiga dan mempunyai frekuensi 500 Hz. Resistor variabel R7 mengatur kecepatan putaran motor listrik.
Skema ketiga
Ini unik, dibangun di atasnya. Osilator master beroperasi pada frekuensi 500 Hz. Lebar pulsa, dan juga kecepatan mesin, dapat diubah dari 2% menjadi 98%.

Kelemahan dari semua skema di atas adalah tidak adanya elemen untuk menstabilkan kecepatan putaran ketika beban pada poros motor DC bertambah atau berkurang. Anda dapat mengatasi masalah ini menggunakan diagram berikut:

Seperti kebanyakan regulator sejenis, rangkaian regulator ini memiliki master tegangan generator yang menghasilkan pulsa segitiga dengan frekuensi 2 kHz. Kekhususan rangkaian adalah adanya umpan balik positif (POS) melalui elemen R12, R11, VD1, C2, DA1.4, yang menstabilkan kecepatan putaran poros motor listrik ketika beban bertambah atau berkurang.
Saat mengatur sirkuit dengan motor tertentu, resistansi R12, pilih kedalaman PIC di mana osilasi otomatis kecepatan putaran tidak terjadi ketika beban berubah.
Bagian pengontrol putaran motor listrik
Di sirkuit ini dimungkinkan untuk menggunakan penggantian komponen radio berikut: transistor KT817B - KT815, KT805; KT117A dapat diganti dengan KT117B-G atau 2N2646; Penguat operasional K140UD7 pada K140UD6, KR544UD1, TL071, TL081; pengatur waktu NE555 - S555, KR1006VI1; sirkuit mikro TL074 - TL064, TL084, LM324.
Saat menggunakan beban yang lebih kuat, transistor kunci KT817 dapat diganti dengan transistor efek medan yang kuat, misalnya IRF3905 atau serupa.