Transformări elementare ale rândurilor matricei bloc. Matrici elementare. Regula lui Cramer pentru rezolvarea sistemelor de n – ecuații liniare cu n – necunoscute
Transformări matriceale elementare- sunt transformări ale matricei, în urma cărora se păstrează echivalența matricelor. Astfel, transformările elementare nu modifică setul de soluții al sistemului de ecuații algebrice liniare pe care îl reprezintă această matrice.
Transformările elementare sunt folosite în metoda Gaussiană pentru a reduce o matrice la o formă triunghiulară sau în trepte.
Definiție
Conversii elementare de șiruri sunt numite:
În unele cursuri de algebră liniară, permutarea rândurilor matricei nu se distinge ca o transformare elementară separată datorită faptului că permutarea oricăror două rânduri matricei poate fi obținută prin înmulțirea oricărui rând matricei cu o constantă și adăugând un alt rând la orice rând de matrice înmulțit. printr-o constantă , .
Definit în mod similar transformări elementare ale coloanei.
Transformări elementare reversibil.
Notația indică faptul că matricea poate fi obținută din transformări elementare (sau invers).
Proprietăți
Invarianța de rang în cadrul transformărilor elementare
Echivalența SLAE-urilor în cadrul transformărilor elementare
Hai sa sunăm transformări elementare asupra unui sistem de ecuații algebrice liniare :- rearanjarea ecuațiilor;
- înmulțirea unei ecuații cu o constantă diferită de zero;
- adunarea unei ecuații la alta, înmulțită cu o constantă.
Găsirea matricilor inverse
| Teoremă (despre găsirea matricei inverse). Fie determinantul matricei diferit de zero, fie matricea definită prin expresia . Apoi, în timpul unei transformări elementare a rândurilor matricei în matricea de identitate din compoziție, are loc simultan o transformare a. |
Reducerea matricilor la formă eșalonată
Să introducem conceptul de matrice pasă: O matrice are vedere în trepte , dacă: Atunci următoarea afirmație este adevărată:Definiții înrudite
Matrice elementară. Matricea A este elementară dacă înmulțirea unei matrice arbitrare B cu aceasta duce la transformări elementare ale rândurilor din matricea B.
Literatură
Ilyin V. A., Poznyak E. G. Algebră liniară: manual pentru universități. - Ed. a VI-a, șters. - M.: FIZMATLIT, 2004. - 280 p.
Fundația Wikimedia. 2010.
Vedeți ce sunt „Transformările matriceale elementare” în alte dicționare:
Introducere. E. particulele în sensul exact al acestui termen sunt particule primare, în continuare necompuse, din care, prin presupunere, constă toată materia. În modern termenul de fizică „E. h." folosit de obicei nu în sensul său exact, dar mai puțin strict pentru nume... ... Enciclopedie fizică
Introducere. E. particulele în sensul exact al acestui termen sunt particule primare, în continuare necompuse, din care, prin presupunere, constă toată materia. În conceptul „E. h." în fizica modernă ideea de entități primordiale își găsește expresie... ... Marea Enciclopedie Sovietică
Acest termen are alte semnificații, vezi Matrice. Matricea este un obiect matematic scris ca un tabel dreptunghiular de elemente ale unui inel sau câmp (de exemplu, numere întregi, reale sau numere complexe) care reprezintă ... ... Wikipedia
O matrice este un obiect matematic scris sub forma unui tabel dreptunghiular de numere (sau elemente ale unui inel) și care permite operații algebrice (adunare, scădere, înmulțire etc.) între aceasta și alte obiecte similare. Reguli de executare... ... Wikipedia
O matrice este un obiect matematic scris sub forma unui tabel dreptunghiular de numere (sau elemente ale unui inel) și care permite operații algebrice (adunare, scădere, înmulțire etc.) între aceasta și alte obiecte similare. Reguli de executare... ... Wikipedia
O matrice este un obiect matematic scris sub forma unui tabel dreptunghiular de numere (sau elemente ale unui inel) și care permite operații algebrice (adunare, scădere, înmulțire etc.) între aceasta și alte obiecte similare. Reguli de executare... ... Wikipedia
O matrice este un obiect matematic scris sub forma unui tabel dreptunghiular de numere (sau elemente ale unui inel) și care permite operații algebrice (adunare, scădere, înmulțire etc.) între aceasta și alte obiecte similare. Reguli de executare... ... Wikipedia
O matrice este un obiect matematic scris sub forma unui tabel dreptunghiular de numere (sau elemente ale unui inel) și care permite operații algebrice (adunare, scădere, înmulțire etc.) între aceasta și alte obiecte similare. Reguli de executare... ... Wikipedia
Transformări matriceale elementare
Transformări matriceale elementare sunt utilizate pe scară largă în diverse probleme matematice. De exemplu, ele stau la baza celebrei metode gaussiene (metoda de eliminare a necunoscutelor) pentru rezolvarea unui sistem de ecuații liniare.
Transformările elementare includ:
1) rearanjarea a două rânduri (coloane);
2) înmulțirea tuturor elementelor unui rând (coloană) a matricei cu un număr diferit de zero;
3) adunarea a două rânduri (coloane) ale unei matrice înmulțite cu același număr, diferit de zero.
Cele două matrici sunt numite echivalent, dacă una dintre ele poate fi obținută de la cealaltă după un număr finit de transformări elementare. În general, matricele echivalente nu sunt egale, dar au același rang.
Calculul determinanților folosind transformări elementare
Folosind transformări elementare este ușor de calculat determinantul matricei. De exemplu, trebuie să calculați determinantul unei matrice:
unde ≠ 0.
Apoi puteți elimina multiplicatorul:

acum, scăzând din elemente j-a coloană, elementele corespunzătoare primei coloane, înmulțite cu, obținem determinantul:

care este egal cu: unde


Apoi repetăm aceiași pași pentru și dacă toate elementele ![]() apoi obținem în sfârșit:
apoi obținem în sfârșit:

Dacă pentru un anumit determinant intermediar se dovedește că elementul său din stânga sus este , atunci este necesar să rearanjați rândurile sau coloanele astfel încât noul element din stânga sus să nu fie egal cu zero. Dacă Δ ≠ 0, atunci acest lucru se poate face întotdeauna. Trebuie avut în vedere faptul că semnul determinantului se modifică în funcție de care element este principalul (adică atunci când matricea este transformată astfel). Atunci semnul determinantului corespunzător este egal.
EXEMPLU Folosind transformări elementare, reduceți matricea
Matricea de transformare este folosită pentru a calcula coordonatele noi ale unui obiect atunci când acesta este transformat. Prin modificarea valorilor elementelor matricei de transformare, orice transformări pot fi aplicate obiectelor (de exemplu: scalare, oglindire, rotire, mutare etc.). În timpul oricărei transformări se menține paralelismul liniilor obiectului.
Coordonatele din PDF sunt exprimate în termeni de spațiu bidimensional. Un punct (x, y) din spațiu poate fi exprimat sub formă vectorială . Al treilea element constant al acestui vector (1) este necesar pentru a utiliza vectorul cu matrice 3x3 în calculele descrise mai jos.
Transformarea dintre două sisteme de coordonate este reprezentată ca o matrice 3x3 și se scrie după cum urmează:
Transformările de coordonate sunt exprimate ca înmulțiri de matrice:
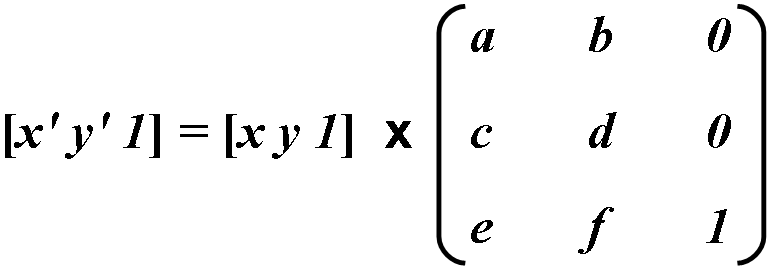
Deoarece ultima coloană nu are nicio influență asupra rezultatelor calculului, ea nu ia parte la calcule. Coordonatele de transformare sunt calculate folosind următoarele formule:

Matrice de identitate
O matrice de identitate este una ale cărei matrice valorează AȘi d egal 1 , iar restul sunt egali 0 . Această matrice este utilizată în mod implicit, deoarece nu duce la transformare. Prin urmare, matricea de identitate este folosită ca bază.

Scalare
Pentru a crește sau a micșora dimensiunea orizontală/verticală a unui obiect, modificați valoarea A sau dîn consecință, și aplicați restul din matricea de identitate.
De exemplu: Pentru a dubla dimensiunea unui obiect pe orizontală, valoarea lui a trebuie luată egală cu 2, iar restul trebuie lăsat ca atare în matricea de identitate.



Reflecţie
Pentru a obține o imagine în oglindă orizontală a unui obiect, setați valoarea a = -1, pe verticală d = -1. Modificarea ambelor valori este folosită pentru a afișa atât pe orizontală, cât și pe verticală în același timp.


Înclinaţie
Înclinarea obiectului pe verticală/orizontală este asigurată prin modificarea valorilor bȘi c respectiv. Schimbarea valorii b/-b- înclinați în sus/jos, c/-c- dreapta stanga.
De exemplu: Pentru a înclina obiectul vertical în sus, setați valoarea b = 1

Calculăm noile coordonate ale obiectului:


Ca urmare, numai coordonatele duce la înclinarea obiectului y, care crește cu valoarea X.
Întoarce-te
Rotația este o combinație de scalare și înclinare, dar pentru a menține proporțiile originale ale unui obiect, transformarea trebuie făcută cu calcule precise folosind sinusuri și cosinusuri.

Rotația în sine are loc în sens invers acelor de ceasornic, α specifică unghiul de rotație în grade.
In miscare
Mutarea se face prin schimbarea valorilor e(pe orizontală) și f(vertical). Valorile sunt specificate în pixeli.
De exemplu: Deplasarea folosind o matrice este rar folosită din cauza faptului că această operație se poate face folosind alte metode, de exemplu, schimbarea poziției unui obiect într-o filă.
Deoarece matricea de transformare are doar șase elemente care pot fi modificate, este afișată vizual în PDF . O astfel de matrice poate reprezenta orice transformare liniară de la un sistem de coordonate la altul. Matricele de transformare sunt formate după cum urmează:
- Mișcările sunt indicate ca , Unde t xȘi Multumesc— distanțe față de axa sistemului de coordonate pe orizontală și respectiv pe verticală.
- Scalare este specificată ca . Aceasta scalează coordonatele astfel încât 1 unitate în dimensiunile orizontale și verticale din noul sistem de coordonate să aibă aceeași dimensiune cu s xȘi s y unități din vechiul sistem de coordonate, respectiv.
- Rotațiile sunt făcute de matrice , care corespunde rotației axelor sistemului de coordonate prin θ grade în sens invers acelor de ceasornic.
- Panta este indicată ca , care corespunde înclinării axei X la un unghi α și osii y la un unghi β .
Figura de mai jos prezintă exemple de transformare. Direcțiile de mișcare, unghiul de rotație și înclinare prezentate în figură corespund valorilor pozitive ale elementelor matricei.

Înmulțirile matricelor nu sunt comutative — ordinea în care sunt înmulțite matricele contează.
Tabelul de mai jos prezintă transformările valide și valorile matricei.
| Desen original | Desen transformat | Matrice | Descriere |
|---|---|---|---|
 |
 |
1 0
0 2 0 0 |
Scară verticală. Dacă valoarea matricei este mai mare decât 1, obiectul se extinde, mai mic decât 1, se contractă. |
|
 |
2 0
0 1 0 0 |
Scară orizontală. Dacă valoarea matricei este mai mare decât 1, obiectul se extinde, mai mic decât 1, se contractă. |
|
 |
-1 0
0 1 0 0 |
Reflexia orizontala. |
|
 |
1 0
0 -1 0 0 |
Reflexie verticală. |
|
 |
1 1
0 1 0 0 |
Înclinare verticală în sus. |
|
 |
1 -1
0 1 0 0 |
Înclinare verticală în jos. |
|
 |
1 0
1 1 0 0 |
Înclinare orizontală spre dreapta. |
|
 |
1 0
-1 1 0 0 |
Transformările elementare sunt următoarele acțiuni pe rândurile și coloanele matricei A:
1) schimbarea a două rânduri sau coloane ale unei matrice;
2) înmulțirea unui rând sau a unei coloane a unei matrice cu un alt număr decât zero;
3) adăugarea unui alt rând (coloană) la un rând (coloană).
Teorema. Transformările elementare nu schimbă rangul matricei, adică dacă matricea B se obține din matricea A prin transformări elementare, atunci.
Dovada. 1). Când schimbați două coloane ale unei matrice, numărul maxim de coloane liniar independente nu se modifică și, prin urmare, rangul său nu se modifică.
2). Fie ca matricea B să se obțină din matricea A prin înmulțirea rândului i cu numărul t0 și r(A) =k. Evident, orice minor al matricei B care nu conține rândul al i-lea este egal cu minorul corespunzător al matricei A și orice minor al matricei B care conține rândul al ilea este egal cu minorul corespunzător al matricei A înmulțit cu numărul t. In consecinta, minorul de ordin k al matricei B, corespunzator bazei minore a matricei A, va fi diferit de zero, iar toate minorele de ordin k+1 ale matricei B, precum si toate minorele de ordinul k+1 ale matricei. A, va fi egal cu zero. Aceasta înseamnă că r(B)=k=r(A).
3). Fie ca matricea B să fie obținută din matricea A prin adăugarea rândului i la rândul j și r(A) = k. Minorii de ordinul k+1 ale matricei B care nu conțin al-lea rând vor fi egale cu minorele corespunzătoare ale matricei A și, prin urmare, egale cu zero. Minorii de ordinul k+1 ale matricei B care contine randurile i-lea si j-lea vor fi egale cu suma a doi determinanti zero. Unul dintre acești determinanți conține două rânduri identice (rândul j conține elementele rândului i), iar al doilea determinant este un minor de ordinul k+1 al matricei A și, prin urmare, este egal cu zero. Minorii de ordinul k+1 ale matricei B, care conțin al-lea rând, dar care nu conțin al-lea rând, vor fi egale cu suma a două minore de ordinul k+1 ale matricei A și, prin urmare, vor fi egale cu zero. În consecință, toate minorele de ordin k+1 ale matricei B sunt egale cu 0 și r(B)k=r(A).
Fie că matricea C se obține din matricea B prin înmulțirea rândului i cu (-1). Apoi matricea A se obține din matricea C prin adăugarea rândului i la rândul j și înmulțind rândul i cu (-1). Prin urmare, după cum sa dovedit mai sus, va exista r(A)r(C) =r(B). Astfel, inegalitățile r(B)r(A) și r(A)r(B) sunt valide simultan, ceea ce înseamnă că r(A) =r(B).
Această proprietate a transformărilor elementare este folosită în practică pentru a calcula rangul unei matrice. Pentru a face acest lucru, folosind transformări elementare, reducem această matrice (diferită de zero) A la o formă trapezoidală, adică la forma
B=  ,
,
unde elementele pentru toate i = 1,2,...,k; elemente pentru toate i > j și
i > k. Evident, r(B) = k, adică rangul matricei B este egal cu numărul de rânduri nenule. Aceasta rezultă din faptul că minorul de ordin k al matricei B, situat la intersecția primelor k rânduri și coloane, este un determinant diagonală și este egal cu; și orice minor de ordinul k+1 al matricei B conține un rând zero, ceea ce înseamnă că este egal cu 0 (sau, dacă k = n, nu există deloc astfel de minore).
Teorema. Orice matrice A diferită de zero de dimensiunea mn poate fi redusă la o formă trapezoidală folosind transformări elementare.
Dovada. Deoarece A0, atunci există un element de matrice  . Schimbând primul și i-lea rând, prima și j-a coloană, mutăm elementul
. Schimbând primul și i-lea rând, prima și j-a coloană, mutăm elementul  în colțul din stânga sus al matricei și notează
în colțul din stânga sus al matricei și notează  . Apoi la i-lea rând al matricei rezultate (i= 2,3, ...,m) adunăm primul rând înmulțit cu numărul
. Apoi la i-lea rând al matricei rezultate (i= 2,3, ...,m) adunăm primul rând înmulțit cu numărul  . În urma acestor transformări elementare, obținem matricea
. În urma acestor transformări elementare, obținem matricea
A  .
.
Dacă toate elementele  matricele A sunt egale cu zero, atunci se demonstrează teorema. Dacă există un element
matricele A sunt egale cu zero, atunci se demonstrează teorema. Dacă există un element  , apoi, prin rearanjarea al doilea și al i-lea rând, a doua și j-a coloană a matricei A, mutăm elementul
, apoi, prin rearanjarea al doilea și al i-lea rând, a doua și j-a coloană a matricei A, mutăm elementul  în locul elementului
în locul elementului  si denota
si denota  (Dacă
(Dacă  , apoi notăm imediat
, apoi notăm imediat  ). Apoi la rândul i al matricei rezultate (i= 3, ...,m) adunăm al doilea rând înmulțit cu numărul
). Apoi la rândul i al matricei rezultate (i= 3, ...,m) adunăm al doilea rând înmulțit cu numărul  . Ca rezultat, obținem matricea
. Ca rezultat, obținem matricea

 .
.
Continuând acest proces, într-un număr finit de pași obținem matricea B, adică reducem matricea A la o formă trapezoidală.
Exemplu. Să calculăm rangul matricei





 . Săgețile indică următoarele transformări elementare: 1) prima și a doua linie au fost schimbate; 2) a adăugat o a treia la a patra linie; 3) a adăugat prima linie, înmulțită cu -2, la a treia linie și a împărțit a patra linie la 3; 4) a împărțit a treia linie la 5 și a schimbat a treia și a patra linie; 5) o a doua linie a fost adăugată la a treia linie, înmulțită cu -3, și o a treia a fost adăugată la a patra linie. Se poate observa că matricea obţinută din matricea A prin transformările elementare indicate are formă trapezoidală cu trei rânduri nenule. Prin urmare, r(A) = 3.
. Săgețile indică următoarele transformări elementare: 1) prima și a doua linie au fost schimbate; 2) a adăugat o a treia la a patra linie; 3) a adăugat prima linie, înmulțită cu -2, la a treia linie și a împărțit a patra linie la 3; 4) a împărțit a treia linie la 5 și a schimbat a treia și a patra linie; 5) o a doua linie a fost adăugată la a treia linie, înmulțită cu -3, și o a treia a fost adăugată la a patra linie. Se poate observa că matricea obţinută din matricea A prin transformările elementare indicate are formă trapezoidală cu trei rânduri nenule. Prin urmare, r(A) = 3.
Transformări matriceale elementare- sunt transformări ale matricei, în urma cărora se păstrează echivalența matricelor. Astfel, transformările elementare nu modifică setul de soluții al sistemului de ecuații algebrice liniare pe care îl reprezintă această matrice.
Transformările elementare sunt folosite în metoda Gaussiană pentru a reduce o matrice la o formă triunghiulară sau în trepte.
Definiție
Conversii elementare de șiruri sunt numite:
În unele cursuri de algebră liniară, permutarea rândurilor de matrice nu este separată într-o transformare elementară separată, datorită faptului că permutarea oricăror două rânduri de matrice poate fi obținută prin înmulțirea oricărui rând de matrice cu o constantă. k (\displaystyle k), și adăugând la orice rând al matricei un alt rând, înmulțit cu o constantă k (\displaystyle k), k ≠ 0 (\displaystyle k\neq 0).
Definit în mod similar transformări elementare ale coloanei.
Transformări elementare reversibil.
Notația indică faptul că matricea A (\displaystyle A) poate fi obtinut de la B (\displaystyle B) prin transformări elementare (sau invers).
Proprietăți
Invarianța de rang în cadrul transformărilor elementare
| Teorema (asupra invarianței rangului sub transformări elementare). Dacă A ∼ B (\displaystyle A\sim B), Acea r a n g A = r a n g B (\displaystyle \mathrm (sunet) A=\mathrm (sunet) B). |
Echivalența SLAE-urilor în cadrul transformărilor elementare
Hai sa sunăm transformări elementare asupra unui sistem de ecuații algebrice liniare :- rearanjarea ecuațiilor;
- înmulțirea unei ecuații cu o constantă diferită de zero;
- adunarea unei ecuații la alta, înmulțită cu o constantă.
Găsirea matricilor inverse
| Teoremă (despre găsirea matricei inverse). Fie determinantul matricei A n × n (\displaystyle A_(n\times n)) nu este egal cu zero, fie matricea B (\displaystyle B) este determinată de expresie B = [ A | E ] n × 2 n (\displaystyle B=_(n\times 2n)). Apoi, cu o transformare elementară a rândurilor matricei A (\displaystyle A) la matricea identitară E (\displaystyle E) ca parte din B (\displaystyle B) transformarea are loc în același timp E (\displaystyle E) La A - 1 (\displaystyle A^(-1)). |