Управление нагрузкой на ардуино 220 в блютуз. Создаем Android-приложение для управления домашним роботом через Bluetooth. Основная активность, сопряжение Arduino и Android
Для беспроводного обмена информации, между различными устройствами на небольших дистанциях, можно использовать Bluetooth-технологию. Для этих целей китайской промышленностью выпускаются различные Bluetooth-модули, среди которых широкую популярность получили модели HC-05 и HC-06. В своё время на Алиэкспресс я приобрёл HC-06, на котором и буду проводить дальнейшие эксперименты, а так же подключать к своему китайскому аналогу Arduino.
Непосредственно сам Bluetooth-модуль. В таком виде он может использоваться в различных устройствах, где впаивается непосредственно в плату. Модуль имеет 34 вывода, среди которых: выводы для соединения с компьютером по UART, передачи звука по методу PCM (импульсно кодовая модуляция), аналоговый вход и выход, контакты для подключения к USB разъёму, SPI интерфейс, а также порты общего назначения. На самом деле не все эти выводы доступны к использованию, заблокирован доступ к выводам передачи звука (5-8), аналоговым входу и выходу (9, 10), а так же к группе контактов для подключения к USB (15, 20).
HC-06 построен на чипе BC417 (BlueCore4-External device), спецификация Bluetooth V2.0. На борту так же имеется кварц на 26 МГц и флеш-память на 8 Мб. Питание осуществляется от 3,3В.

Для своих конструкций удобнее всего использовать модуль с макетной платой, на которой выведены необходимые контакты для подключений, а так же имеется стабилизатор напряжения, который позволяет питаться от 5 вольт.
При покупки подобных модулей, можете столкнуться с различными их маркировками. По сути это одно и то же устройство, отличающееся прошивкой, которая определяет режим модуля (master / slave).

Отличие HC-05 от HC-06 состоит в том, что HC-05 можно использовать в качестве ведомого (master) или ведущего (slave). Данные режимы задаются с помощью АТ-команд. Кнопка на плате модуля переключает его в режим ввода АТ-команд. Режим master даёт возможность модулю самому обнаруживать подобное устройство и организовывать связь с ним. Модуль HC-06 может работать только в одном фиксированном режиме slave.
Так же существуют модели HC-03 и HC-04, но они выпускаются для промышленных целей.
Обозначение контактов на плате HC-06.

STATE
- проверка состояние модуля. На этом контакте дублируется сигнал, который отображает встроенный на плате светодиод. Если он очень быстро мигает, значит модуль находится в активном состоянии. В режиме установления связи ток составляет 30-40 мА. Когда модуль устанавливает связь с другим устройством, светодиод просто горит. В режиме передачи данных ток составляет 8 мА.
RX
- получение данных.
TX
- передача данных.
GND
- подключается к земле.
+5V
- питание +5 Вольт
EN
- включение / выключение модуля. Если на этот контакт подать логическую 1 (5 вольт), модуль выключится, если подать логический 0 или не подключаться к этому контакту, модуль будет работать.
По-умолчанию HC-06 имеет имя для обнаружения другими устройствами «HC-06 », с пин-кодом «1234 ».
Для изменения этих данных нужно модуль подключить к компьютеру и с помощью программы-терминала ввести АТ-команды. Это можно сделать с помощью переходника USB to COM с TTL уровнями. Для этих целей подойдёт адаптер на PL2303HX , CH340G , либо другой подобный. На компьютере к этому моменту уже должен быть установлен драйвер для USB адаптера.
Контакты соединяем следующим образом:
| HC-06 | Переходник USB to COM |
| +5V | +5V |
| GND | GND |
| RX | TX |
| TX | RX |
При подключении этой сборки к компьютеру, красный светодиод на плате Bluetooth-модуля начнёт быстро мигать. Для ввода АТ-команд можно воспользоваться любой терминальной программой, я использую для этой цели Arduino IDE.

В настройках выбираем номер виртуального COM-порта, на котором подключен USB адаптер, в моём случае это COM44. Откроем окно «Монитора последовательного порта ».

Введём заглавными буквами команду «AT », если устройство удачно подключилось, в ответ должно возвратится «ОК ». По-умолчанию скорость обмена данными 9600 бод.
Для проверки версии прошивки, введём команду «AT+VERSION », в моём случае ответ возвратился «OKlinvorV1.8 ».
Командой «AT+NAMEyyy », где ууу - произвольный набор символов на латинице, можем сменить имя, по которому будут находить наш модуль bluetooth-устройства (по-умолчанию HC-06). В своём примере я ввёл «AT+NAMEfox », ответ возвращается OKsetname .
Командой «AT+PINxxxx », где xxxx – произвольный набор цифр, можно сменить пин-код (по-умолчанию 1234). В ответ возвращается «OKsetPIN ».
Командой «AT+BAUDx », где x – значение от 1 до 9, можно изменить скорость в бодах (по-умолчанию 9600).
1 - 1200
2 - 2400
3 - 4800
4 - 9600
5 - 19200
6 - 38400
7 - 57600
8 - 115200
9 - 230400
Допустим, если ведём команду «AT+BAUD8
», где 8 - скорость 115200 бод, в ответ возвратится «OK115200
».
Подключение HC-06 к Arduino.
Пример 1. Зальём в Arduino скетч, с помощью которого будем включать и выключать светодиод, распаянный на 13 пине Arduino, через Bluetooth-модуль.
| int data; int LED = 13; void setup() { Serial.begin(9600); pinMode(LED, OUTPUT); digitalWrite(LED, HIGH); } void loop() { if (Serial.available()) { data = Serial.read(); if (data == "1") { digitalWrite(LED, HIGH); } if (data == "0") { digitalWrite(LED, LOW); } } } |

Если у вас нет на плате данного светодиода, подключите его к 13 пину по схеме, номиналы резисторов можно взять от 220 Ом до 1кОм.

Обесточим Arduino и подключим HC-06. Контакт TX модуля подключаем к контакту RX Ардуино (пин 0 на плате UNO), а контакт RX , к контакту TX (пин 1). Контакты +5V и GND , подключаются к соответствующим пинам Ардуино.

Конструкция в сборе. Подав питание на Ардуино, светодиод на HC-06 должен быстро мигать.
Управление Arduino через HC-06, с помощью компьютера.
Пример буду показывать на Windows XP. К компьютеру должен быть подключен любой USB Bluetooth-адаптер и установленны на него драйвера.

В моём случае использовался вот такой адаптер.

При его подключении к ПК, в трее (возле часов) появляется соответствующая иконка.

Нажимаем правой кнопкой мыши на данной иконке и в контекстном меню выбираем «Добавить устройство Bluetooth ».

Ставим переключатель «Устройство установлено и готово к обнаружению » и нажимаем «Далее ».

В списке обнаруженных устройств отобразится наш Bluetooth-модуль, с новым именем, которое я поменял ранее. Выбираем его и нажимаем «Далее ».

В следующем окне вводим пин-код для подключения к модулю, выбрав пункт «Использовать ключ доступа из документации: ». По-умолчанию это «1234», но я его сменил на «9999». Нажимаем «Далее ».

Bluetooth-модуль успешно связался с компьютером, о чём можно узнать с соответствующего окна. Следует обратить внимание, при образовании связи между двумя Bluetooth-устройствами, на компьютере создастся два новых виртуальных COM-порта (будут отображаться в диспетчере устройств), один для исходящих данных, другой для входящих. Нам понадобится порт для исходящих данных, в моём случае это COM45.
Вновь открываем какую-нибудь программу-терминал, я воспользуюсь Arduino IDE. В настройках выбираем исходящий порт (у меня COM45), открываем «Монитор последовательного порта », вводим переменно команды «1 » и «0 ». При команде «1» светодиод загорается, при «0» гаснет.
Управление Arduino через HC-06 с помощью смартфона.
Наверное уже все современные смартфоны имеют в своём составе встроенный Bluetooth. Остаётся только установить программу терминал. В моём случае использовалась Lumia 640 DS , с установленной Windows mobile 10 . В качестве программы терминала использую «». На Android-смартфонах всё аналогично, в качестве программы можно использовать «Bluetooth Terminal ».
Для обладателей смартфонов компании Apple не получится работать с Bluetooth-модулями HC-05 и HC-06 (Bluetooth V2.0), для них придётся использовать адаптеры с технологией BLE (Bluetooth low energy), спецификация Bluetooth 4.0. Ярким представителем является модуль HM-10.
Сопрягаем HC-06 с блютузом смартфона.
1. В «Параметрах
» смартфона выбираем пункт «Устройства
».
2. Далее «Bluetooth и другие устройства
».
3. Включаем ползунком блютуз смартфона и нажимаем на «плюс в квадрате
» для поиска и добавления нового Bluetooth-устройства, в нашем случае HC-06.
4. В разделе «Добавить устройство
» выбираем «».
5. Смартфон произведёт поиск Bluetooth-устройств находящихся в округе и отобразит их имена. В моём примере найден модуль HC-06, который я переименовал в «fox
».
6. Вводим пин-код устройства, к которому подключаемся, нажимаем кнопку «Подключиться ».
Устанавливаем и запускаем терминальную программу «». Подключенный к смартфону модуль HC-06, отображается в списке, выбираем его.

Появится поле для ввода команд и кнопка для отправки. Вводим попеременно «1 » и «0 » и наблюдаем за светодиодом на 13 пине, который будет зажигаться или гаснуть.
Пример 2 . Подключим к Arduino три светодиода и попробуем управлять ими через Bluetooth-модуль HC-06.

Светодиоды подключил к 9, 11 и 13 пину, если будите использовать другие пины, их нужно указать в скетче.
| int data; int LED1 = 9; int LED2 = 11; int LED3 = 13; void setup() { Serial.begin(9600); pinMode(LED1, OUTPUT); pinMode(LED2, OUTPUT); pinMode(LED3, OUTPUT); digitalWrite(LED1, HIGH); digitalWrite(LED2, HIGH); digitalWrite(LED3, HIGH); } void loop() { if (Serial.available()) { data = Serial.read(); if (data == "1") { digitalWrite(LED1, HIGH); } if (data == "2") { digitalWrite(LED1, LOW); } if (data == "3") { digitalWrite(LED2, HIGH); } if (data == "4") { digitalWrite(LED2, LOW); } if (data == "5") { digitalWrite(LED3, HIGH); } if (data == "6") { digitalWrite(LED3, LOW); } } } |
При заливке скетча модуль HC-06 нужно отсоединить от Ардуино, потому что и компьютер, и блютуз работают по UART. Ардуина не может на одном UART работать с несколькими устройствами.
Запускаем программу-терминал и пробуем скетч в действии. Смысл управления светодиодами следующий, имеется три светодиода, каждый из которых может быть либо включенный, либо выключенный. Получается 6 команд. Команды представляют из себя цифры от 1 до 6 (1, 3, 5 - зажечь 1, 2 и 3 светодиоды. 2, 4, 6 - погасить). Цифры можно вводить по одной, либо в виде комбинаций. Например: 145 - зажечь первый, погасить 2-й, зажечь 3-й.
Пример 3 . Подключим к Arduino реле-модуль из статьи « » и попробуем управлять мощной нагрузкой через Bluetooth. По сути, у нас получится «умная розетка». К реле-модулям можно подключать различные нагрузки (лампочки, насосы, вентиляторы) и управлять ими на расстоянии.

Скетч по этому примеру появится в ближайшее время.
Вам необходимо дистанционно управлять вашей Arduino платой, обмениваться данными с другими bluetooth устройствами? Блютуз модули HC-05, HC06 помогут справиться с этой задачей.
В первой части статьи мы расскажем о том, как установить беспроводное соединение между Arduino и компьютером, а во второй части как установить соединение между Arduino и телефоном на платформе Android. .
Данная статья будет составной частью в дальнейшей сборке дистанционно управляемой машинки.

Компоненты для повторения (купить в Китае):
Модули HC-05/06 представляют из себя голые блютузы с дополнительной обвязкой.
А именно: установлены на подложку, на которой расположен стабилизатор с 5 на 3.3Вольта, светодиод, указывающий на состояние модуля (образовано соединение или нет), и конденсаторы на линиях питания. Также на плате установлен mosfet транзистор (Q1), который при надобности может разрывать цепь питания блютуза, тем самым отключая его, но в нашем обзоре это задействовано не будет.

С лицевой стороны модуль выглядит вот так
Подключение к Arduino
| Bluetooth HC-05/06 | Arduino |
| VCC | +5V |
| GND | GND |
| TX | RX |
| RX | TX |
При подаче питания на модуль встроенный светодиод начинает мигать.
1) C компьютером (операционка WIN7)
2) C телефоном (операционка ANDROID)
В обоих случаях нам будет необходимо выполнить 2 действия : выполнить сопряжение модуля и устройства, управлять через какой-нибудь терминал.
Часть 1. Соединение с компьютером (WIN7)
Если в вашем компьютере нет встроенного блютуза, то можно воспользоваться . Найти его в салонах связи или на радио рынках не составит труда.
После установки драйверов на блютуз можно приступать к работе.
. Действие 1
Идем в панель управления, щелкаем на иконку блютуза и выбираем "Показать устройства Bluetooth"

Через некоторое время компьютер произведет поиск и вы увидите ваш модуль (У вашего модуля может быть другое имя).

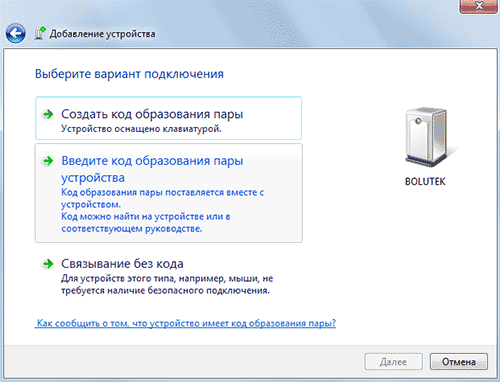
Выбираем второй вариант - "Введите код образования пары устройства"

Для HC-06 этот код 1234

Завершается все такой картиной.

А за ним еще одно

Первый этап настройки завершен
В случае, если вы забудете каким COM портом у вас определился блютуз, это всегда можно посмотреть выполнив следующие действия:
Действия



P.S. Или посмотреть в диспетчере устройств
. Действие 2
Для передачи данных можно использовать любой терминал. Я использовал простой и бесплатный "Termite ".
В качестве примера мы будем изменять состояние встроенного на плату Arduino светодиода "LED 13". Включаться он будет при приеме символа "W", а отключаться при "S". Приведенный ниже скетч нужно залить в плату Arduino. При заливке в плату необходимо отсоединить питание от блютуз модуля , после заливки снова подсоединить.
пример программного кода:
int val; int LED = 13; void setup () { Serial .begin (9600); pinMode (LED, OUTPUT ); } void loop () { if (Serial .available ()) { val = Serial .read (); // При символе "W" включаем светодиод if (val == "W" ) { digitalWrite (LED, HIGH ); } // При символе "S" выключаем светодиод if (val == "S" ) { digitalWrite (LED, LOW ); } } } Открываем программу "Termite "
В настройках выбираем наш порт, скорость (9600).


Также модуль можно проверить и без Arduino просто замкнув выводы TX и RX. Termite отправляемые символы отмечает синим цветом, полученные зелеными. Т.е. если при закороченных выводах мы отправили и нам пришло тоже самое - значит что модуль работает исправно. На фото ниже это и продемонстрировано.

Часть 2. Соединение с телефоном (Android)
В качестве подопытного будет взят телефон Samsung Galaxy Ace 2 на операционке Android.
. Действие 1
Соединяем с телефоном

. Действие 2
В качестве терминала выберем опять-таки простой и бесплатный, но уже "Bluetooth Terminal "

P.S. В случае если не удается подключиться, отключайте питание от блютуза и подключайте заново.
В настоящее время в зарубежных и отечественных магазинах можно найти большое количество различных Bluetooth Serial модулей для DIY-устройств. Цена на них не сильно высока: 5-10$ за модуль (с учетом бесплатной доставки в любую страну). Их легко можно найти на широко известной площадке AliExpress введя в поисковую строку одно из словосочетаний: Bluetooth RS232, Bluetooth Serial, HC-03, HC-04, HC-05, HC-06 или нажать на эту ссылку .
В большинстве модулей используется чип BC417, плюс Flash-память. Чип поддерживает спецификацию Bluetooth v2.0 + EDR, AT-команды, может работать в режиме Master или Slave (модули HC-03/HC-5, может устанавливаться AT-командой), поддерживает скорость обмена от 2400 до 1382400.
Напряжение питание модуля составляет 3.3В, ток потребления ~50мА.
Модули HC-03/HC-05 более функциональные, чем HC-04/HC-06.
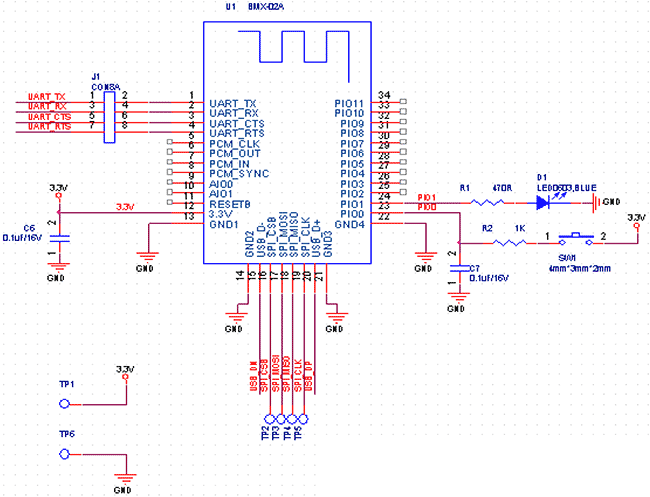
Основные выводы модулей HC-04/HC-06:
UART_TX (pin 1), UART_RX (pin 2), UART_CTS (pin 3), UART_RTS (pin 4) - пины UART.
3,3V (pin 12) - питание 3.3В.
GND (pin 13) - общий.
PIO1 (pin 24) - индикатор рабочего режима. Если соединение не установлено - то светодиод мигает, если установлено, то постоянно горит.
Для модулей HC-03/HC-05 есть некоторые отличия. Линии UART и питания те же самые, но:
PIO8 (pin 31) - индикатор рабочего режима.
PIO9 (pin 32) - статус соединения, если соединение установлено, то на выходе будет высокий уровень.
PIO11 (pin 34) - вход включения режима AT-команд (необходимо подать лог. 1).
За более подробной документацией обращайтесь к PDF .
Итак, соберем простую схему для подключения Bluetooth модуля HC-06 к плате Arduino Nano V3.
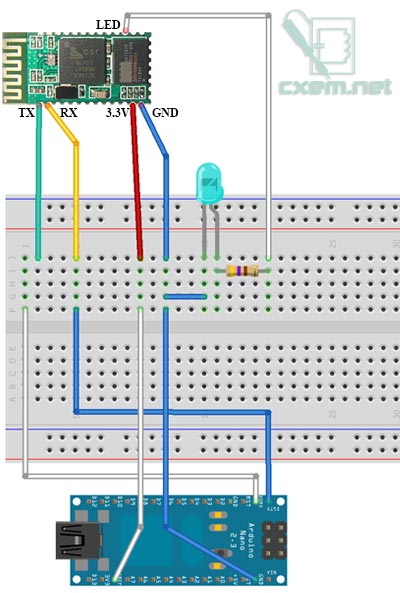
Обратите внимание, что выводы TX и RX в плате Arduino Nano поменяны местами в отличии от Ardunio UNO и др. Поэтому внимательно смотрите распиновку своей Arduino платы.
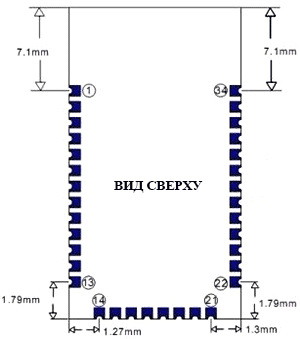
Шаг между выводами в модуле составляет всего 1.5мм, поэтому придется взяться за паяльник и припаять провода к модулю. Всего необходимо припаять 5 проводов, однако светодиод подключать необязательно, он служит для индикации состояния.
Итак припаиваем провода и подключаем Bluetooth модуль следующим образом:
вывод Arduino 3.3В - к 12 пину модуля
вывод Arduino GND - к 13 пину модуля
вывод Arduino TX - к 2 пину модуля RX
вывод Arduino RX - к 1 пину модуля TX
Передача данных из Arduino по Bluetooth
Int cnt = 0; // счетчик void setup() { Serial.begin(9600); // инициализация порта } void loop() { cnt++; Serial.print("Hello BB from Arduino! Counter:"); // выводим надпись Serial.println(cnt); // выводим значение счетчика и переводим на новую строку delay(1000); // ждем 1 секунду }
Как видите скетч довольно простой и хорошо прокомментирован. В цикле, раз в секунду происходит увеличение переменной cnt, которая затем с текстовой надписью выводится в последовательный порт на Bluetooth модуль. Обратите внимание, что скорость порта установлена в значение 9600. При покупке модуля, спрашивайте на какое значение установлена скорость обмена по последовательному интерфейсу. Но в большинстве случаев это 9600. При необходимости, скорость обмена можно изменить АТ-командами.
Откройте данный скетч в Arduino IDE, скомпилируйте и прошейте ваш Arduino. Если вы подключали светодиод в Bluetooth модулю, то он должен мигать, показывая тем самым, что модуль ожидает соединение.
Внимание! Если при прошивке платы Arduino ругается прошивальщик, то отключите питание 3.3В с Bluetooth модуля.

На компьютере, в качестве Bluetooth модуля использовался самый дешевый китайский Bluetooth USB адаптер, стоимостью около 200 руб. После того, как адаптер подключается к компьютеру, установите необходимые драйвера (в Windows 7 x64 у меня все драйвера поставились автоматом).
Затем щелкаем в трее по иконке Bluetooth модуля и выбираем "Добавить устройство":

Имя моего модуля BOLUTEK, у вас оно скорее всего будет другим. Нажимаем "Далее" и переходим к окну, где необходимо ввести пароль для устройства:
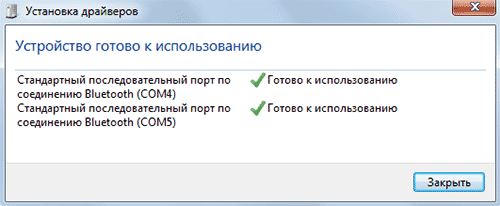
Выбираем второй пункт: "Введите код образования пары устройства". С завода, код установлен 1234. Его и вводим. Программа настроит и пропишет в системе виртуальные COM-порты (у меня прописало 2 шт, но может быть и один):
В дальнейшем, можно посмотреть на какой COM-порт назначилось и его параметры. Для этого щелкаем правой кнопкой мыши по устройству и выбираем "Свойства" и вкладку "Оборудование". Там можно посмотреть и изменить параметры виртуального COM-порта:

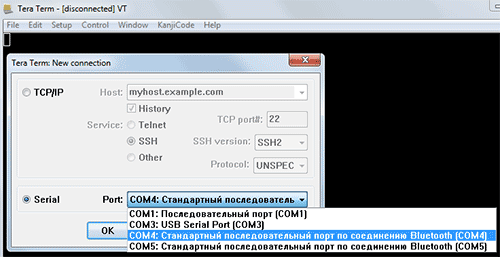
Теперь, для приема и передачи данных на виртуальный COM порт можно использовать любую терминал программу. Я использовал бесплатную . При каждом запуске программы предлагается выбор соединения, переключаем флажок на Serial и выбираем COM порт вашего Bluetooth модуля. У меня это COM4.
В терминале мы видим данные счетчика с платы Arduino:
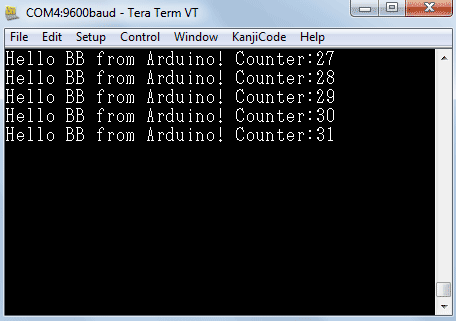
Как видим, данные успешно передаются по Bluetooth соединению. Ниже в статье вы можете посмотреть видео.
Двунаправленный обмен данными по Bluetooth
Следующим шагом будет написание простенькой программы двунаправленного обмена данными между Arduino и компьютером. В схему я добавил светодиод, подключив его к 12 пину Arduino, через токоограничительный резистор. Но можно использовать и встроенный LED (обычно 13 пин).
Char incomingByte; // входящие данные int LED = 12; // LED подключен к 12 пину void setup() { Serial.begin(9600); // инициализация порта pinMode(LED, OUTPUT); Serial.println("Press 1 to LED ON or 0 to LED OFF..."); } void loop() { if (Serial.available() > 0) { //если пришли данные incomingByte = Serial.read(); // считываем байт if(incomingByte == "0") { digitalWrite(LED, LOW); // если 1, то выключаем LED Serial.println("LED OFF. Press 1 to LED ON!"); // и выводим обратно сообщение } if(incomingByte == "1") { digitalWrite(LED, HIGH); // если 0, то включаем LED Serial.println("LED ON. Press 0 to LED OFF!"); } } }
Программа работает очень просто. После запуска или сброса устройства, в последовательный порт выводится сообщение с предложением нажать 1 или 0. В зависимости от нажатой цифры светодиод будет загораться или гаснуть. А также, от Arduino будет выводиться сообщение загорелся светодиод, или погас.
И работу с ним.
Модернизация Motor Shield
Получилось так, что производители модуля Motor Shield лишили своих покупателей возможности устанавливать поверх своего продукта другой модуль. Видимо им нравится быть сверху или просто зажали нормальную панельку контактов.
Меня этот нюанс совсем не устраивает. Именно поэтому я решил взяться за паяльник и привести Motor Shield к удобному для меня виду.

Аккуратно выдрал родные панельки контактов и выкинул их нафиг.

Установил на их место нормальные.

В таком виде модулем стало пользоваться гораздо удобнее. Теперь я смогу нормально подключить провода от Bluetooth в разъемы, а не припаивать их намертво к контактам на Motor Shield.
Bluetooth модуль JY-MCU для Arduino

Сам Bluetooth модуль JY-MCU довольно миниатюрный. В комплект поставки входит кабель для подключения. Назначение выводов расписано на обратной стороне.

Запитать его можно от источника питания 3,6-6В. Это предоставляет нам возможность подключить его напрямую к Arduino без использования стабилизатора или делителя напряжения.
Код, используемый при подключении к устройству: 1234.
Подключение Bluetooth JY-MCU к Arduino Mega 2560
Подключение довольно простое.
Официальная схема подключения:
- TXT на JY-MCU подключаем к RX (0) на Arduino
- RXD на JY-MCU подключаем к TX (1) на Arduino
При таком варианте подключения придется каждый раз отключать питание модуля Bluetooth перед загрузкой скетча. Не забывайте про это.
Меня такой вариант не устраивает, поэтому я решил использовать дискретные порты с поддержкой Serial.
Неофициальная схема подключения:
- VCC на JY-MCU подключаем к +5В Arduino
- GND на JY-MCU подключаем к GND Arduino
- TXT на JY-MCU подключаем к дискретному PIN 50 на Arduino
- RXD на JY-MCU подключаем к дискретному PIN 51 на Arduino
Вот теперь можно загружать скетчи без отключения питания модуля Bluetooth.
Чтобы закрепить Bluetooth, я решил использовать плату Proto Shield и миниатюрную беспаечную макетную плату. К ней в будущем и буду подключать остальное оборудование, элементы управления и индикации.



Скетч для управления роботом на Arduino по Bluetooth через смартфон на Android
В своём скетче я реализовал следующие функции:
- Движение вперед
- Движение назад
- Разворот влево
- Разворот вправо
- Плавный поворот влево при движении вперед
- Плавный поворот вправо при движении вперед
- Плавный поворот влево при движении назад
- Плавный поворот вправо при движении назад
- Остановка
Установка скорости 0%
Установка скорости 10%
Установка скорости 20%
Установка скорости 30%
Установка скорости 40%
Установка скорости 50%
Установка скорости 60%
Установка скорости 70%
Установка скорости 80%
Установка скорости 90%
Установка скорости 100%
В скетче использовал функции, чтобы не дублировать код при схожих событиях.
#include
// Подключаем библиотеку для управления двигателями
#include// Подключаем библиотеку для сервоприводов
#include// Подключаем библиотеку для работы с Serial через дискретные порты //Создаем объекты для двигателей
AF_DCMotor motor1(1); //канал М1 на Motor Shield - задний левый
AF_DCMotor motor2(2); //канал М2 на Motor Shield - задний правый
AF_DCMotor motor3(3); //канал М3 на Motor Shield - передний левый
AF_DCMotor motor4(4); //канал М4 на Motor Shield - передний правый// Создаем объект для сервопривода
Servo vservo;SoftwareSerial BTSerial(50, 51); // RX, TX
// Создаем переменную для команд Bluetooth
char vcmd;
// Создаем переменные для запоминания скорости двигателей
int vspdL, vspdR;
/* Создаем переменную, на значение которой будет уменьшаться скорость при плавных поворотах.
Текущая скорость должна быть больше этого значения. В противном случае двигатели со стороны направления поворота просто не будут вращаться */
int vspd = 200;void setup() {
// Устанавливаем скорость передачи данных по Bluetooth
BTSerial.begin(9600);
// Устанавливаем скорость передачи данных по кабелю
Serial.begin(9600);
// Выбираем пин к которому подключен сервопривод
vservo.attach(9); // или 10, если воткнули в крайний разъём
// Поворачиваем сервопривод в положение 90 градусов при каждом включении
vservo.write(90);
// Устанавливаем максимальную скорость вращения двигателей
vspeed(255,255);
}void loop() {
// Если есть данные
if (BTSerial.available())
{
// Читаем команды и заносим их в переменную. char преобразует код символа команды в символ
vcmd = (char)BTSerial.read();
// Отправляем команду в порт, чтобы можно было их проверить в "Мониторе порта"
Serial.println(vcmd);// Вперед
if (vcmd == "F") {
vforward();
}
// Назад
if (vcmd == "B")
{
vbackward();
}
// Влево
if (vcmd == "L")
{
vleft();
}
// Вправо
if (vcmd == "R")
{
vright();
}
// Прямо и влево
if (vcmd == "G")
{
vforwardleft();
}
// Прямо и вправо
if (vcmd == "I")
{
vforwardright();
}
// Назад и влево
if (vcmd == "H")
{
vbackwardleft();
}
// Назад и вправо
if (vcmd == "J")
{
vbackwardright();
}
// Стоп
if (vcmd == "S")
{
vrelease();
}
// Скорость 0%
if (vcmd == "0")
{
vspeed(0,0);
}
// Скорость 10%
if (vcmd == "1")
{
vspeed(25,25);
}
// Скорость 20%
if (vcmd == "2")
{
vspeed(50,50);
}
// Скорость 30%
if (vcmd == "3")
{
vspeed(75,75);
}
// Скорость 40%
if (vcmd == "4")
{
vspeed(100,100);
}
// Скорость 50%
if (vcmd == "5")
{
vspeed(125,125);
}
// Скорость 60%
if (vcmd == "6")
{
vspeed(150,150);
}
// Скорость 70%
if (vcmd == "7")
{
vspeed(175,175);
}
// Скорость 80%
if (vcmd == "8")
{
vspeed(200,200);
}
// Скорость 90%
if (vcmd == "9")
{
vspeed(225,225);
}
// Скорость 100%
if (vcmd == "q")
{
vspeed(255,255);
}
}
}// Вперед
void vforward() {
vspeed(vspdL,vspdR);
vforwardRL();
}// Вперед для RL
void vforwardRL() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}// Назад
void vbackward() {
vspeed(vspdL,vspdR);
vbackwardRL();
}// Назад для RL
void vbackwardRL() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}// Влево
void vleft() {
vspeed(vspdL,vspdR);
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}// Вправо
void vright() {
vspeed(vspdL,vspdR);
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}// Вперед и влево
void vforwardleft() {
if (vspdL > vspd) {
vspeed(vspdL-vspd,vspdR);
}
else
{
vspeed(0,vspdR);
}
vforwardRL();
}// Вперед и вправо
void vforwardright() {
if (vspdR > vspd) {
vspeed(vspdL,vspdR-vspd);
}
else
{
vspeed(vspdL,0);
}
vforwardRL();
}// Назад и влево
void vbackwardleft() {
if (vspdL > vspd) {
vspeed(vspdL-vspd,vspdR);
}
else
{
vspeed(0,vspdR);
}
vbackwardRL();
}// Назад и вправо
void vbackwardright() {
if (vspdR > vspd) {
vspeed(vspdL,vspdR-vspd);
}
else
{
vspeed(vspdL,0);
}
vbackwardRL();
}// Стоп
void vrelease(){
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}// Изменение скорости
void vspeed(int spdL,int spdR){
if (spdL == spdR) {
vspdL=spdL;
vspdR=spdR;
}
motor1.setSpeed(spdL);
motor2.setSpeed(spdR);
motor3.setSpeed(spdL);
motor4.setSpeed(spdR);
}
Программа Bluetooth RC Car - управление роботом-машинкой со смартфона на Android
В свой смартфон я установил программу Bluetooth RC Car . На мой взгляд - это лучшая софтинка для управления роботом-машинкой.

Программа позволяет передавать команды при нажатии на кнопки или реагировать на данные с акселерометра в смартфоне, регулировать скорость движения ползунком, включать передние и задние фонари, включать и выключать звуковой сигнал, включать и выключать сигнал “аварийка”.



Для работы программы требуется Android версии 2.3.3 или выше. Размер программы 3 мегабайта.
Список команд:
- F – вперед
- B – назад
- L – влево
- R – вправо
- G – прямо и влево
- I – прямо и вправо
- H – назад и влево
- J – назад и вправо
- S – стоп
- W – передняя фара включена
- w – передняя фара выключена
- U – задняя фара включена
- u – задняя фара выключена
- V – звуковой сигнал включен
- v – звуковой сигнал выключен
- X – сигнал “аварийка” включен
- x - сигнал “аварийка” выключен
- 0 – скорость движения 0%
- 1 – скорость движения 10%
- 2 – скорость движения 20%
- 3 – скорость движения 30%
- 4 – скорость движения 40%
- 5 – скорость движения 50%
- 6 – скорость движения 60%
- 7 – скорость движения 70%
- 8 – скорость движения 80%
- 9 – скорость движения 90%
- q – скорость движения 100%
Как вы видите, полигон для творчества вполне неплохой. Я бы еще добавил возможность раздельного включения правых и левых фонарей для передних и задних фар.
Жирным я выделил команды, поддержка которых уже реализована в скетче. Остальные я собираюсь использовать по другому назначению.
Принцип передачи команд: при нажатии на кнопку в программе, команда передается по Bluetooth один раз, а при отпускании кнопки сразу передается команда S-остановка.
Демонстрация работы
В следующий раз я планирую подключить к роботу ультразвуковой дальномер и реализовать алгоритм объезда препятствий.
Если помните, для этого приходилось использовать дополнительную Arduino с Joystick Shield. Притом вся эта конструкция получалась довольно громоздкой и неудобной, особенно если учитывать, что джойстику нужно от чего-то питаться, а также тот факт, что NRF24L01 для работы нужен дополнительный переходник со стабилизатором напряжения. Поэтому сегодня мы рассмотрим альтернативный подход, заключающийся в использовании Bluetooth-модуля HC-05.
Примечание: Существует похожий модуль HC-06. В отличие от HC-05, который может быть как ведущим (мастером), так и ведомым устройством, HC-06 может быть только ведомым. В остальном HC-05 и HC-06 практически не отличаются. Также существуют модули HC-07, HC-08 и HC-09. Прочитать про различия между ними можно .
HC-05 имеет шесть пинов, но из них нам понадобится только четыре: VCC, GND, RX и TX. Кроме того, мы временно припаяем дополнительный провод к пину 34 непосредственно используемого в HC-05 Bluetooth-модуля EGBT-045MS, чтобы сменить имя, под которым будет видно устройство. Если вас устраивает имя по умолчанию, «HC-05», то можете ничего и не припаивать. Итак, VCC и GND пины подключаем к пинам 5V и GND Ардуины, TX пин HC-05 — к пину 2, а RX пин — к пину 3, и, наконец, пин 34 EGBT-045MS — к пину 4 Ардуины.
Получившаяся конструкция:
Ответ на вопрос где искать этот 34-ый пин у EGBT-045MS, содержится в :

Пример кода прошивки:
#include
#include
/* Connect HC-05 TX to Arduino RX and HC-05 RX to Arduino TX */
SoftwareSerial Bluetooth(2
, 3
)
;
/* RX, TX */
const
int
pin34 =
4
;
bool
newline_printed =
false
;
void
setup()
{
Serial.begin
(9600
)
;
Serial.println
("Arduino is ready"
)
;
Bluetooth.begin
(9600
)
;
Serial.println
("Bluetooth is ready"
)
;
PinMode(pin34, OUTPUT)
;
digitalWrite(pin34, HIGH)
;
Bluetooth.println
("AT+NAME=ARDUINO-BLUETOOTH"
)
;
digitalWrite(pin34, LOW)
;
}
void
loop()
{
if
(Bluetooth.available
()
)
{
char
c =
Bluetooth.read
()
;
if
(c ==
"#"
)
{
if
(!
newline_printed)
{
Serial.println
(""
)
;
newline_printed =
true
;
}
}
else
{
Serial.print
(c)
;
newline_printed =
false
;
}
}
if
(Serial.available
()
)
{
char
c =
Serial.read
()
;
Serial.write
(c)
;
Bluetooth.write
(c)
;
}
}
Взаимодействие с модулем происходит по UART. Так как мы не хотим потерять возможность обмена данными с компьютером, используется класс SoftwareSerial. Он работает точно так же, как уже знакомый нам Serial, но, в отличие от него, может использовать произвольные пины Arduino.
Подавая высокое напряжение на 34-ый пин EGBT-045MS, мы переводим его в режим выполнения AT-команд. Полный список доступных команд можно найти в уже упомянутом EGBT-045MS / EGBT-046S Bluetooth Module Manual . В приведенном примере просто меняется имя модуля. Сменив его один раз, лишний провод можно смело отпаивать, так как модуль запомнить свое новое имя в энергонезависимой памяти.
Можно найти великое множество готовых Android-приложений, подходящих для передачи команд модулю HC-05. Мне, к примеру, очень понравилось приложение Arduino BT Joystick. У него есть как платная , так и бесплатная версия с рекламой . Интерфейс приложения выглядит как-то так:

Жмем Connect, находим в списке наше устройство, вводим пин 1234, и можно отправлять команды при помощи кнопок, а также встроенного в телефон акселерометра. Другими словами, приложение позволяет, помимо прочего, управлять Arduino, просто вращая телефон в руках.b= указывает на то, что далее содержится код кнопки, 0 , 1 и так далее — это коды кнопок. Учтите, что если пользователь ничего не нажимает, то приложение непрерывно шлет ##b=0##b=0##... . Если в приложении вы разрешили использование акселерометра, то помимо значений b также будут передаваться значения x , y и z .
Преимущество использования Bluetooth заключается в том, что не нужно делать отдельный джойстик. Подойдет любой смартфон или планшет под управлением Android. Кроме того, EGBT-045MS производит впечатление модуля, который легко выпаять из HC-05 и затем использовать в самодельный платах .
Полную версию исходников к этой заметке вы найдете на GitHub . Вопросы и дополнения, как всегда, горячо приветствуются!